第 1 章 · CartPole 倒立摆
本章目标:零基础运行第一个 RL 训练脚本,直观感受智能体如何通过试错自主习得策略。不要求任何理论知识。
📁 本章代码:1-ppo_cartpole.py · 2-pytorch_ppo.py · requirements.txt
1.1 运行 CartPole 训练
经过上面的前置阅读,我们已经对强化学习有了一个初步印象。下面先回顾强化学习的核心机制:它由一个智能体(Agent)和一个环境(Environment)组成,智能体通过不断尝试动作并获取奖励信号,逐步学习在特定状态下应采取的最优决策。
那么,什么才是"恰当的决策"?我们从一个经典任务入手——CartPole(倒立摆)。正如 print("Hello World") 是编程入门的第一步,用几十行代码让一根杆子在小车上保持平衡,是踏入强化学习领域的标准起点。

你可能会问:训练这样一个智能体需要什么硬件条件?
事实上,这个任务的计算需求很低,普通个人电脑(包括 Intel Mac、Apple Silicon、Windows/Linux)均可运行:
- 不需要显卡 (GPU):该任务的计算量很小,CPU 即可完成训练。
- 内存占用极小:运行时的内存占用通常在 100MB~200MB 左右。
- 模型参数量极少:使用的神经网络策略(
MlpPolicy)只有两层,每层 64 个神经元,参数量仅数千个。
在这个过程中,我们将使用 Gymnasium(当前 RL 环境的绝对标准)作为训练场,并引入 Stable Baselines3 (SB3) 算法库。如果说 PyTorch 是造汽车的零件,那么 SB3 就是已经组装好的发动机,它把前沿的 PPO 算法封装成了几行极简的代码。
本章不要求读者事先掌握复杂的微积分或高维矩阵运算。接下来直接动手,用代码实现一个 CartPole 智能体。

安装依赖
首先,打开你的终端,安装环境库和算法库:
pip install "gymnasium[classic-control]" stable-baselines3注意:
stable-baselines3依赖于PyTorch。由于 PyTorch 体积较大,这一步可能需要较长的下载时间。这是整个第一章中唯一涉及大体积依赖安装的步骤。
运行训练脚本
首先安装完整依赖:
pip install -r requirements.txt这个仓库给了你两个 CartPole 实现,任选一种先跑通都可以:
- 1-ppo_cartpole.py:基于 SB3 的 PPO 封装版,最适合第一次快速跑通。
- 2-pytorch_ppo.py:纯 PyTorch 手写 PPO 版,适合想要了解实现细节的读者。
这两个脚本都会把训练指标记录到 SwanLab,并且训练结束后都支持用 --gui 弹出小车演示窗口:
# SB3 封装版(推荐第一次先跑这个)
python 1-ppo_cartpole.py
python 1-ppo_cartpole.py --gui
# 纯 PyTorch 版(希望同时了解实现细节可运行此版本)
python 2-pytorch_ppo.py
python 2-pytorch_ppo.py --gui运行后你会看到控制台快速滚动训练日志,训练完成后模型会自动保存到 output/ 目录。
关于 --gui 参数:训练阶段始终是 headless(无渲染),速度不受影响。--gui 只控制训练结束后的演示环节是否弹出 CartPole 动画窗口。开启 GUI 时每帧需要等待屏幕刷新(约 16ms),演示会慢一些;关闭 GUI 时演示环节纯计算,几秒内跑完。
SwanLab 训练曲线查看方法
本章两个脚本默认都把 SwanLab 配成了 mode="local",所以最常见的查看方式是本地看板。训练跑完后,在当前目录执行:
swanlab watch swanlog然后在浏览器打开下面任意一个地址:
http://127.0.0.1:5092http://localhost:5092
浏览器打开本地地址后,你通常会先看到这样的 SwanLab 项目页:
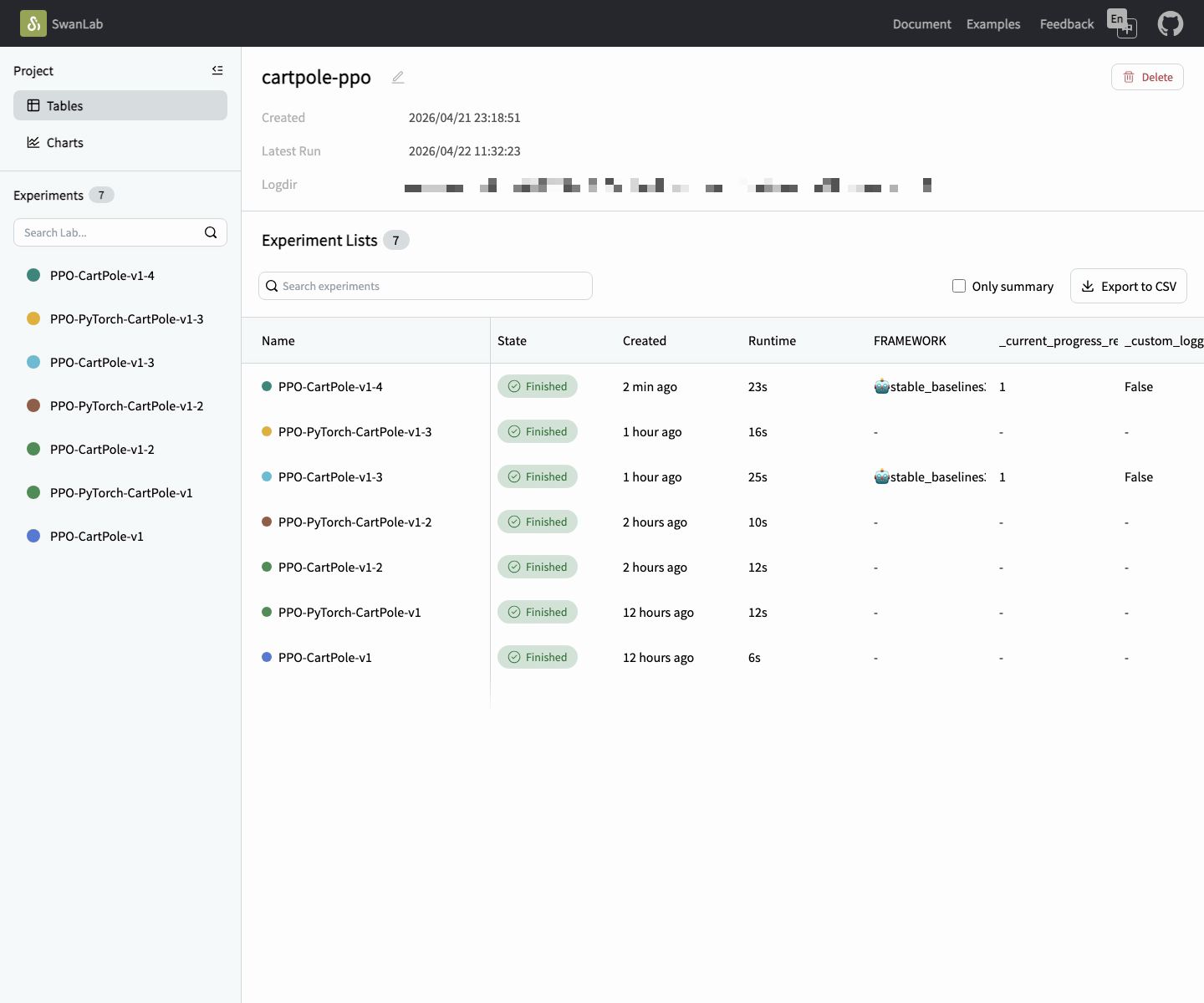
http://127.0.0.1:5092 后,通常会先进入这样的项目页。左侧能看到实验列表;点进某个实验后,再切到 Chart 标签,就能继续看训练曲线。点进实验后,你会看到类似下面这样的曲线页:
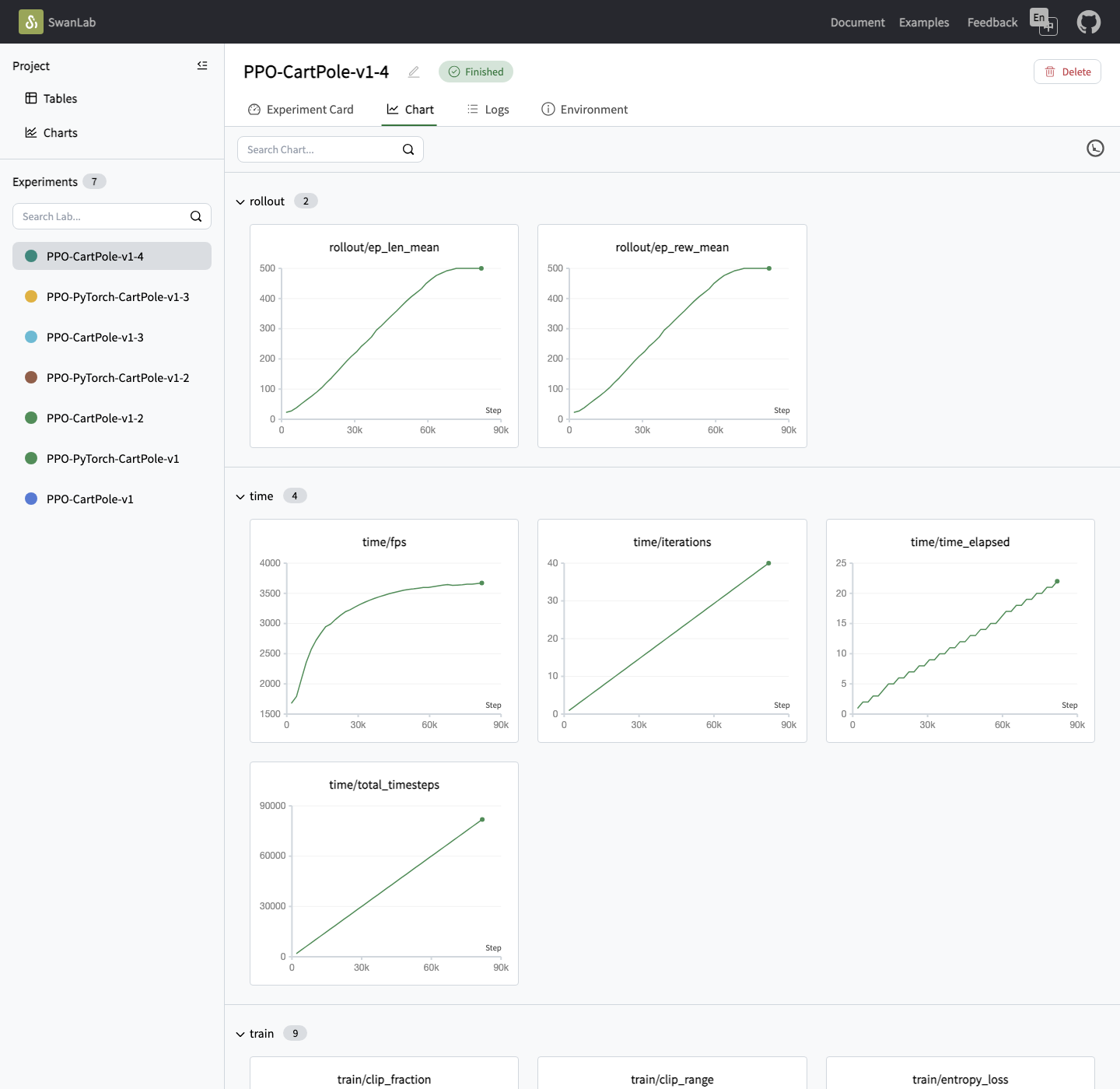
Chart 后的页面。这里会按 rollout、time、train 等分组展示指标曲线。你最先该看的曲线通常是 rollout/ep_rew_mean,也就是”平均每局得分”。它持续上升,即表明智能体的表现正在改善。
如果你后面把 SwanLab 改成云端模式,那么常见入口就是官网工作台:
https://swanlab.cn
登录后进入你的项目页或实验页,也能看到同样的训练曲线。本章先用本地模式,是为了让你不用注册账号也能直接看结果。
如果你想系统读懂这些曲线里的每个指标,下一节可以继续看 训练与指标。
# 下面先以 SB3 版为例;纯 PyTorch 版记录的指标名保持一致,只是把 PPO 训练循环完整展开了
import gymnasium as gym
from stable_baselines3 import PPO
from swanlab.integration.sb3 import SwanLabCallback
env = gym.make("CartPole-v1")
model = PPO("MlpPolicy", env, verbose=1)
# 训练(SwanLab 自动记录奖励曲线等指标)
model.learn(
total_timesteps=80000,
callback=SwanLabCallback(
project="cartpole-ppo",
experiment_name="PPO-CartPole-v1",
mode="local",
),
)
# 评估与保存
mean_reward, std_reward = evaluate_policy(model, env, n_eval_episodes=10)
print(f"训练完成!平均奖励: {mean_reward} +/- {std_reward}")
model.save("output/ppo_cartpole")
# 演示(加 --gui 时 render_mode="human" 弹出窗口,否则纯计算)
vis_env = gym.make("CartPole-v1", render_mode="human") # 或 None
for episode in range(5):
obs, info = vis_env.reset()
...以上短短几十行代码,就实现了一个通过自我试错掌握平衡控制的智能体。那么,这个黑盒内部究竟发生了什么?接下来的「核心原理」和「训练与指标」两节将逐步展开。