11.3 VLM RL 框架与前沿——从实验到应用的桥梁
前两节我们做了 VLM GRPO 实验,分析了 VLM RL 的独特挑战。这些讨论主要集中在"问题"层面——奖励归因怎么做、视觉幻觉怎么防、视觉编码器更新不更新。这一节我们来看"解决方案"——当前有哪些框架正在系统性地解决这些问题,以及 VLM RL 的未来可能走向何方。
11.3.1 VisPlay:提问者与推理者的协同进化
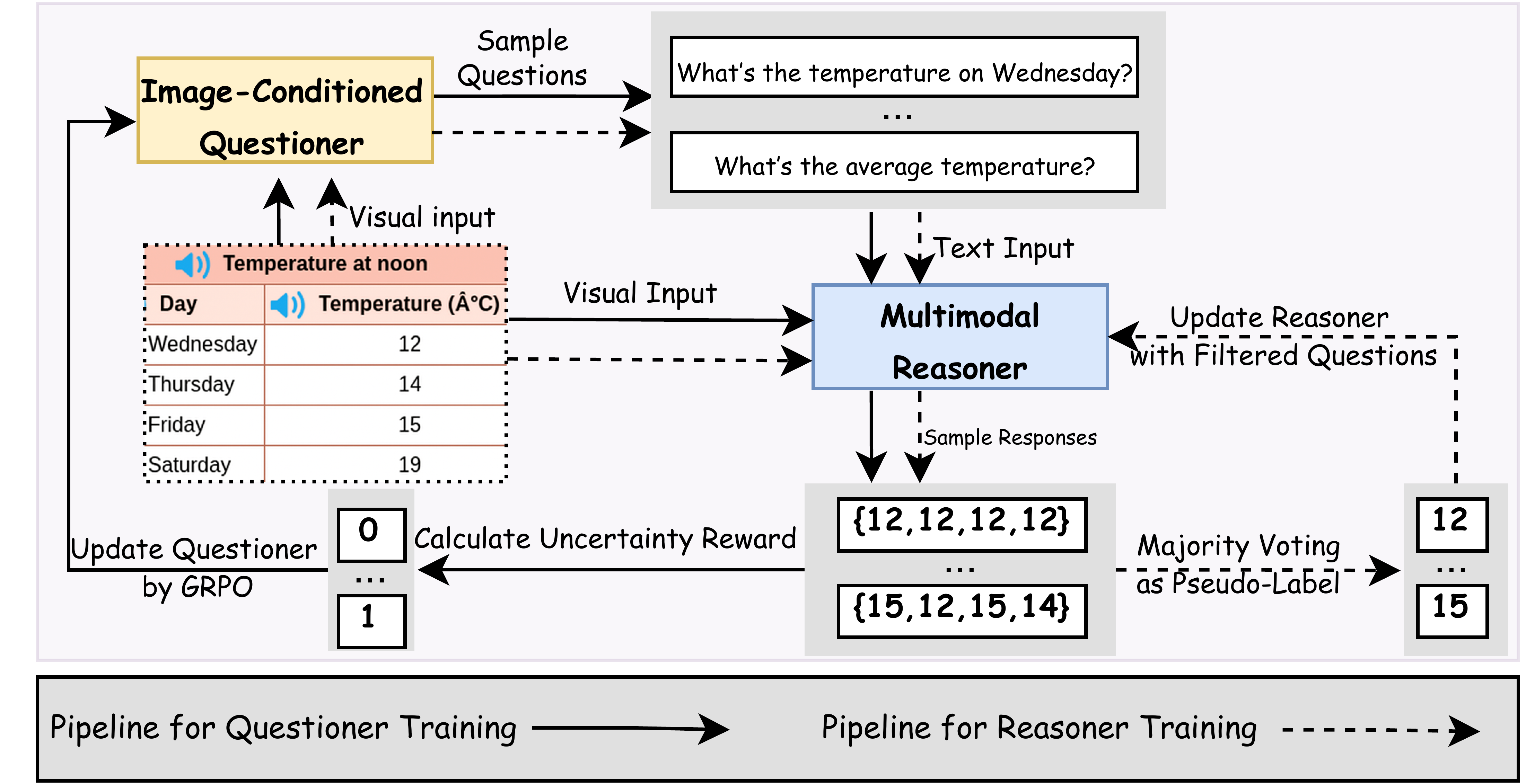
VisPlay 是一个很有创意的 VLM RL 框架,它的核心思想是让两个模型通过 RL 互相博弈、协同进化——一个负责"出题"(Questioner),一个负责"答题"(Reasoner)。这和第 8 章讨论的 Self-Play 思想一脉相承,但专门为视觉场景设计。
双模型架构
提问者(Questioner) 的任务是生成有挑战性的视觉问题。它的输入是一张图片,输出是一个关于图片内容的问题。好的问题应该满足两个条件:一是模型目前的推理者还回答不好(有挑战性),二是问题的答案可以从图片中确定性地得出(有客观标准)。
推理者(Reasoner) 的任务就是回答提问者的问题。它的输入是图片和问题,输出是回答。和上一节的 VLM GRPO 实验一样,推理者通过 RL 来优化回答质量。
两个模型的协同进化形成了一个正反馈循环:提问者不断提出更难的问题 → 推理者被迫提升能力来回答 → 提问者必须出更刁钻的问题才能"难住"推理者 → 推理者继续提升……这个循环和 AlphaGo 的自我博弈(回顾第 5 章)在结构上是相同的——通过不断提升对手的强度来驱动自身的进化。
VisPlay 的奖励设计也很有意思。提问者的奖励取决于推理者的表现——如果推理者答对了,说明问题太简单,提问者得到负奖励;如果推理者答错了,说明问题有挑战性,提问者得到正奖励。但这有一个平衡问题:如果提问者出了根本无法回答的问题(比如问图片中不存在的细节),推理者答错了不应该算提问者的功劳。所以提问者的奖励还需要包含一个"可回答性"约束——问题必须是图片中确实存在的。
推理者的奖励和上一节类似——答案正确性、推理质量、格式规范。但多了一个维度:回答的速度(推理效率)。在实际部署中,VLM 的推理延迟直接影响用户体验,所以鼓励模型生成简洁高效的回答。
11.3.2 VISTA-Gym:工具集成的视觉 RL 环境
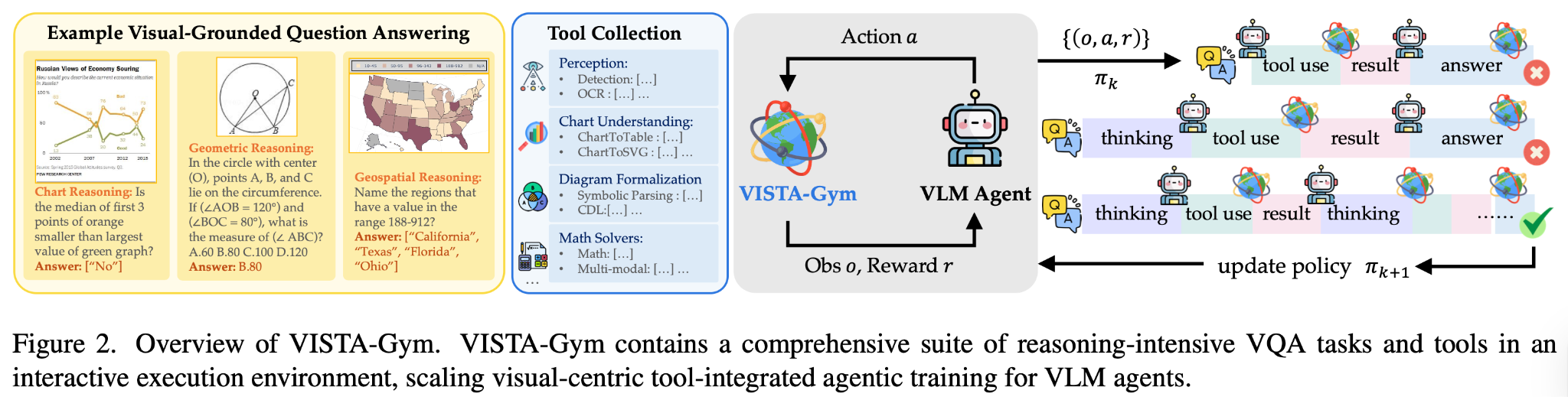
VISTA-Gym 的设计理念是"让 VLM 不只是看和说,还能动手做"。它把 Python 解释器、搜索引擎、图像标注工具等纳入了 VLM 的动作空间——模型不只能生成文本回答,还能调用工具来验证和改进自己的推理。
工具增强的推理链
想象一个场景:给模型看一张图片,问"图片中的建筑物是什么风格?"。传统的 VLM 直接输出答案——"这是哥特式建筑"。但有了工具增强,模型可以做更深入的推理:
- 描述图片:"我看到一座有尖塔和飞扶壁的石头建筑"
- 调用图像标注工具:让工具标出关键视觉特征
- 搜索验证:调用搜索引擎查找"尖塔 + 飞扶壁"对应的建筑风格
- 综合回答:"根据尖塔和飞扶壁的特征,结合搜索结果,这很可能是哥特式建筑"
VISTA-Gym 的奖励设计需要同时评估"回答质量"和"工具使用效率"。如果模型调用了 10 次工具才得到答案,效率显然不如只调用 2 次的方案。所以奖励函数通常包含一个工具调用次数的惩罚项:
其中 是工具调用次数, 是效率权重。
与 GRPO 的结合
VISTA-Gym 可以和 GRPO 自然结合。对同一个图片+问题,模型生成多组推理链(每组包含不同的工具调用序列),然后用规则奖励评估每组的质量,计算组内相对优势,更新策略。这和第 9 章的 GRPO 完全一致——只是生成的"回答"从纯文本变成了"工具调用序列 + 最终回答"。
11.3.3 框架对比
把 VisPlay、VISTA-Gym 和上一节的 VLM GRPO 实验放在一起对比:
| VLM GRPO(基础版) | VisPlay | VISTA-Gym | |
|---|---|---|---|
| 核心思想 | 用 GRPO 优化 VLM 回答质量 | 提问者+推理者协同进化 | 工具增强的推理链 |
| 数据来源 | 人工构造的静态数据集 | 模型自动生成问题和回答 | 图片 + 工具调用环境 |
| 奖励类型 | 规则奖励(正确性+推理+格式) | 模型间博弈的胜负信号 | 规则奖励 + 工具效率惩罚 |
| 优势 | 简单直接,容易复现 | 数据自动生成,持续进化 | 推理更可靠,可验证 |
| 劣势 | 静态数据,天花板有限 | 两个模型联合训练,工程复杂 | 工具环境搭建成本高 |
| 适用场景 | 快速验证、教学实验 | 长期持续优化 | 需要高可靠性的场景 |
这三个框架不是互相替代的,而是解决不同层面的问题。VLM GRPO 是"基础训练"——用固定的数据集和规则奖励打好基础。VisPlay 是"持续进化"——通过自我博弈来突破静态数据的限制。VISTA-Gym 是"可靠性增强"——通过工具调用来验证推理过程。在实际应用中,这三者可以串联使用:先用 GRPO 打基础,再用 VisPlay 做持续优化,最后用 VISTA-Gym 做可靠性验证。
11.3.4 VLM RL 的前沿方向
VLM RL 是一个快速发展的领域,以下几个方向值得关注:
视频理解
从图像理解到视频理解,是一个自然的演进。视频不只包含空间信息(图片里有什么),还包含时间信息(事物如何变化)。VLM RL 在视频理解上的挑战包括:如何设计时序奖励(模型是否理解了事件的发展顺序),如何处理长视频的计算成本(一个 1 分钟的视频可能包含数千帧图像),以及如何评估视频理解的准确性("理解了一段视频"比"数对了几个圆形"更难量化评估)。
3D 场景理解
从 2D 图像到 3D 场景,VLM 需要理解深度、遮挡和空间关系。这在机器人导航和增强现实场景中至关重要。3D 场景理解的一个独特挑战是视角不变性——同一个物体从不同角度看应该被识别为同一个物体。RL 可以通过在不同视角间切换来训练这种不变性。
机器人 VLM-RL
VLM-RL 在机器人领域的应用前景最为广阔。机器人需要从摄像头输入中理解环境,然后做出操作决策。和第 12.1 节具身智能讨论的连续控制不同,VLM-RL 的核心是"用视觉理解来指导动作"——不是直接从像素到力矩,而是先理解"面前是什么物体",再决定"该怎么操作"。
| 路线 | 输入如何进入策略 | 优势 | 风险 |
|---|---|---|---|
| 端到端像素 RL | 图像特征直接映射到动作 | 延迟低,控制链短 | 可解释性弱,迁移成本高 |
| VLM-RL | 先形成语义理解,再辅助决策 | 可解释、可接自然语言与工具 | 推理延迟、跨模态归因更复杂 |
| 分层方案 | VLM 负责高层目标,低层控制器执行 | 更接近工程部署 | 高低层接口需要严格验证 |
这种"理解 → 决策"的范式有几个关键优势:一是可解释性——你可以看到模型为什么做了一个决策(因为它说了"前方有障碍物,所以绕行");二是泛化能力——理解了"杯子"这个概念的模型,可以把"抓取杯子"的能力迁移到不同形状的杯子上;三是人机协作——人类可以用自然语言给机器人下指令,VLM 理解指令后指导机器人执行。
机器人 VLM-RL 的训练流程
机器人 VLM-RL 的训练通常遵循"仿真预训练 → 仿真精调 → 现实迁移"的三步流程:
仿真预训练阶段,在大量仿真场景中用 RL 训练 VLM 的视觉理解和决策能力。仿真环境的优势是可以快速生成大量训练数据(包括各种边界情况),且训练过程绝对安全。
仿真精调阶段,针对目标机器人的具体场景做精细化训练。这一步会引入域随机化(Domain Randomization,回顾第 12.1 节具身智能)——随机化光照、纹理、物体位置等参数,让策略在各种条件下都能工作。
现实迁移阶段,把仿真训练好的模型部署到真实机器人上,用少量真实数据做微调。这一步是最难的——因为仿真和现实之间存在不可避免的差异(物理参数不精确、传感器噪声、控制延迟等)。
# ==========================================
# 机器人 VLM-RL 的简化训练流程
# ==========================================
def robot_vlm_rl_train(vlm, simulator, num_episodes=10000):
"""机器人 VLM-RL 训练流程"""
optimizer = setup_optimizer_with_lr_decay(vlm)
best_reward = -float('inf')
for episode in range(num_episodes):
# 1. 在仿真环境中生成场景
scene = simulator.reset()
image = simulator.render_camera() # 获取摄像头图像
# 2. VLM 理解场景并生成决策
scene_desc = vlm.describe(image)
action_plan = vlm.plan_action(scene_desc)
# 3. 执行动作并收集奖励
total_reward = 0
for action in action_plan:
obs, reward, done, info = simulator.step(action)
total_reward += reward
# 安全性检查(硬约束)
if info.get('collision', False):
total_reward -= 10.0
break
# 4. 用 GRPO 或 PPO 更新策略
loss = compute_policy_gradient_loss(vlm, episode_data)
loss.backward()
torch.nn.utils.clip_grad_norm_(vlm.parameters(), max_norm=1.0)
optimizer.step()
# 5. 定期评估并保存最优模型
if total_reward > best_reward:
best_reward = total_reward
save_model(vlm, 'best_vlm_robot.pt')
if (episode + 1) % 1000 == 0:
eval_reward = evaluate(vlm, simulator, num_episodes=50)
print(f"Episode {episode+1} | "
f"训练奖励: {total_reward:.1f} | "
f"评估奖励: {eval_reward:.1f}")11.3.5 从文本 RL 到多模态 RL:回顾与展望
回顾前面章节的完整学习路径,我们看到 RL 从最简单的表格方法一路发展到了多模态的复杂场景:
| 章节 | 输入 | 动作空间 | 奖励来源 | 核心算法 |
|---|---|---|---|---|
| 第 4 章:DQN | 状态向量/像素 | 离散 | 环境内置 | DQN |
| 第 5 章:策略梯度 | 状态向量 | 离散/连续 | 环境内置 | REINFORCE |
| 第 8 章:RLHF/PPO | Token 序列 | 离散(token) | RM 打分 | PPO |
| 第 9 章:GRPO | Token 序列 | 离散(token) | 规则验证 | GRPO |
| 第 10 章:Agentic RL | 文本 + 工具轨迹 | 工具调用 / token | 结果奖励 + 过程奖励 | PPO/GRPO |
| 第 11 章:VLM RL | 图像 + Token | 离散(token) | 规则 + 模型 + grounding | GRPO |
贯穿始终的核心思想没有变——策略梯度定理(第 5 章)、Actor-Critic 架构(第 6 章)、PPO 的裁剪稳定性(第 7 章)、GRPO 的组内优势(第 9 章)。变化的是输入的模态、动作的空间和奖励的来源。这就是为什么我们在前几章花了大量篇幅打理论基础——这些基础在多模态场景中完全适用。
思考题:如果把 VLM 的输入从静态图片换成视频流,GRPO 的代码需要改哪些部分?
核心的 GRPO 算法代码(组内相对优势计算、策略梯度损失)完全不需要改。需要改的是模型的输入处理层:从处理单帧图像的 ViT 改为处理视频序列的时序模型(比如 TimeSformer 或 ViViT)。视觉 token 不再是"一张图片的特征",而是"一段视频的时空特征"。
奖励函数也需要相应调整——视频理解的奖励不只看"最终答案对不对",还要看模型是否理解了事件的时间顺序和因果关系。比如问"视频中的猫是在跳跃之前还是之后打翻了杯子",模型需要理解两个事件的先后关系,而不只是识别出"猫"和"杯子"。
VLM RL 是当前最活跃的研究方向之一。从 GPT-4V 到 Gemini,从 LLaVA 到 Qwen-VL,每一个多模态大模型的发布都伴随着 RL 训练方法的改进。这个领域还有太多未解决的问题——视觉幻觉、奖励归因、安全性与效率的权衡、从仿真到现实的迁移……每一个问题的解决都可能催生新的应用场景。
11.3.6 从 VLM RL 到多模态 Agent
VLM RL 训练出的是"能看懂图的模型"。但真实场景中,用户需要的往往是"能看懂图、还能动手操作"的智能体——比如截图理解 + 自动操作(GUI Agent)、图表分析 + 数据查询(Data Agent)。这就是从 VLM RL 到多模态 Agent 的跨越:视觉理解 + 工具调用。
多模态 Agent 的典型场景
| 场景 | 输入 | 需要的工具 | 纯文本 Agent 能做吗 |
|---|---|---|---|
| 分析财报图表 | 📊 图片 | 计算器、数据库查询 | ❌ 看不懂图表 |
| 根据截图修 Bug | 📸 截图 | 代码编辑器、终端 | ❌ 看不到 UI |
| 电商比价购物 | 🖼️ 商品图 | 浏览器、搜索 API | ❌ 无法理解图片 |
| 医学影像辅助诊断 | 🏥 CT/MRI | 医学知识库、诊断工具 | ❌ 无法处理影像 |
多模态 Agent RL 的特殊挑战
把本章的 VLM RL 和第 10 章的 Agent RL 结合,会面临三个额外的挑战:
1. 错误归因。 当多模态 Agent 给出错误结果时,错误可能来自视觉理解("看错了"图表中的数值)或工具调用("做错了"传了错误参数)。这两种错误的修复方式完全不同——前者需要更多的 VLM RL 训练(本章的方法),后者需要更多的 Agent RL 训练。实践中需要分阶段验证:先检查视觉理解是否正确,再检查工具调用是否合理。
2. 跨模态奖励设计。 纯文本 Agent 的 reward 只看文本质量,而多模态 Agent 的 reward 需要同时覆盖视觉理解准确性和工具使用正确性:
def multimodal_agent_reward(trajectory, task):
"""多模态 Agent 的复合奖励"""
visual_reward = evaluate_visual_understanding(task.image, trajectory.visual_description)
tool_reward = evaluate_tool_usage(task.required_tools, trajectory.tool_calls)
outcome_reward = task.verify_final_result(trajectory.final_output)
return 0.2 * visual_reward + 0.3 * tool_reward + 0.5 * outcome_reward3. 跨模态 Credit Assignment。 在一条 10 轮的轨迹中,第 2 轮的视觉理解错误可能导致第 5 轮的工具调用失败。这比纯文本 Agent 的 credit assignment 更难,因为跨模态的错误传播链更长、更隐晦。第 10 章讨论的 ORM vs PRM 取舍在这里更加突出。
代表性工作
GUI Agent。 通过 RL 训练模型理解屏幕截图中的 UI 元素(按钮、输入框),并执行点击、输入、滚动等操作。代表工作包括 CRAFT-GUI(桌面环境 GUI 操作)、MobileRL(移动端触屏操作)。GUI Agent 有一个天然的 RLVR 优势——操作是否成功是客观可验证的。
多模态 Deep Research。 Tongyi DeepResearch 已经支持多模态输入,能分析搜索结果中的图表和图片、从 PDF 论文中提取图表数据。这是 VLM RL + Agent RL 整合的前沿方向。
创作型 Agent。 接收用户需求和参考图片,调用图片生成/编辑工具创作。挑战在于 reward 的主观性——"风格转换得好不好"没有客观标准,需要用 LLM-as-Judge 评估。
训练路径
如果你想训练多模态 Agent,建议的路径是:
- 先练视觉理解:用本章的 VLM GRPO 训练基础视觉能力
- 再练工具调用:用第 10 章的工具调用 RL训练基本的工具使用模式
- 最后联合训练:在多模态 Agent 任务上做端到端 RL,reward 设计参考上面的复合奖励函数
关键原则:先单独验证视觉理解和工具调用各自达标,再做端到端联合训练。如果基础组件有问题,联合训练也救不回来。
下一节我们把视角从"视觉理解"转到"视觉生成"——看看 Diffusion 和视频生成模型如何通过 RL 后训练提升文本对齐、视觉质量和指令遵循能力。
参考资料
- VisPlay Project Page —— 展示了 Image-Conditioned Questioner 与 Multimodal Reasoner 协同训练的整体框架。
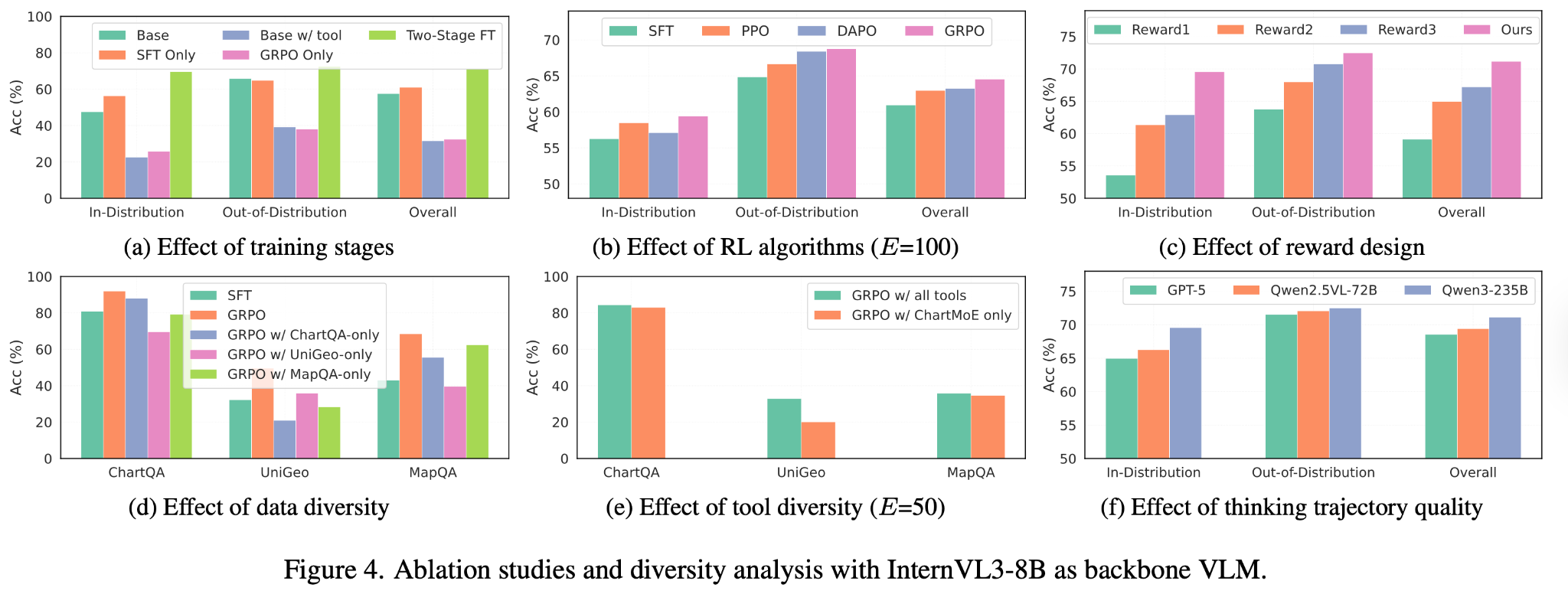
- VISTA-Gym / VISTA-R1 Blog —— 展示了工具增强视觉问答环境、VISTA-R1 主结果和消融分析。