强化学习导论
Note
希望本开源教程能够让更多人拥有向智能上限发起攀登的勇气,解决更多通往 AGI 道路上的问题。
当前教程快速迭代中。建议只看非 🚧 状态的章节,🚧 状态的章节很可能有错误,也欢迎修正和建议。欢迎给 GitHub 仓库 点个 Star 🌟 加速一下更新~
寻求帮助
由于资源稀缺问题,我们正在寻求显卡支持,如果您有显卡使用方式愿意支持非常欢迎联系 physicoada@gmail.com。
从 CartPole 开始
CartPole 是强化学习教学中的经典入门示例:一根杆子通过关节连在小车上,智能体控制小车左右移动,使杆子保持竖直平衡。该任务对计算资源的要求很低,普通笔记本的 CPU 即可在 30 秒内训练出能稳定立杆的策略,无需 GPU;涉及的数学原理将在后续章节逐步展开,此处无需先行掌握。
在进入正文之前,建议先通过下列任一方式完成一次训练:
- 浏览器一键体验(部署中):无需本地环境,直接在网页中启动训练。主源 ModelScope 创空间、副源 HuggingFace Space(链接待补)。
- 本地跑通训练:使用 CPU 在 30 秒内完成训练,完整流程(含
pip install、运行脚本、看板查看方法)见 第 1 章 · CartPole 入门。 - 视觉预览:上图为 CartPole 的运行画面,"小车左右移动 → 杆子保持竖直"即为训练目标;训练初期 reward 通常在 20 附近震荡,约 30 秒后稳定上升至 500 满分。
本节的目标仅在于跑通训练、观察学习现象;具体的代码实现与算法原理将在第 1 章中展开。
本书内容概览
CartPole 是 1990 年代起的经典控制任务,代表了强化学习的过去;本书的主角是 LLM 时代的现代强化学习。下列四项工作分别对应书中各章节的核心议题。
- DPO 与大模型对齐:用户要求模型协助编写恶意代码时,对齐前的模型照单全收,对齐后的模型能够识别风险并拒绝。第 16 章 DPO 家族用约 200 行代码复现这一微调。
- GRPO 与推理涌现:未经推理数据训练的基座模型,仅靠强化学习即可自发产生反思、验证、纠错的长思维链,对应 DeepSeek-R1 的核心范式。第 17 章 GRPO 家族讨论其实现机制,第 18 章 Reasoning Models展开 Test-time Scaling 的全景。
- Computer Use 与 GUI 智能体:模型读取屏幕像素、点击按钮、填写表单,完成多步图形界面任务。第 26 章 Computer Use 与多智能体协作分析 UI-TARS-2、AutoGLM 等代表性工作的训练原理。
- SWE-Agent 与自主 Bug 修复:智能体读取代码仓库、定位缺陷、修改代码、运行测试,通过 SWE-bench 评测。第 24 章 RL-based SWE基于 Meta 的 SWE-RL 算法、Code World Model 与 Self-play SSR 训练开源版本。
强化学习的应用价值
2019 年,强化学习领域的奠基人之一理查德·萨顿(Richard Sutton)写了一篇不到两页的短文,题目叫《苦涩的教训》(The Bitter Lesson)。他回顾了人工智能 70 年的历史,得出了一个让许多研究者难以接受的结论:
The biggest lesson that can be read from 70 years of AI research is that general methods that leverage computation are ultimately the most effective, and by a large margin.
从 70 年的 AI 研究中可以得出的最大教训是:利用计算能力的通用方法终将是最有效的,而且会遥遥领先。
—— Rich Sutton, 2019. 萨顿与导师安德鲁·巴托(Andrew Barto)因奠定了强化学习的理论基础,共同获得 2024 年 ACM 图灵奖。
理查德·萨顿(Richard S. Sutton),强化学习奠基人之一,2024 年图灵奖得主。来源:Wikimedia Commons(CC BY 2.0)
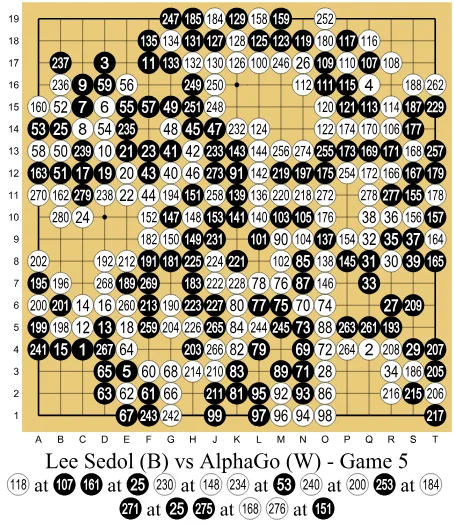
为什么说它"苦涩"?因为同样的故事在 AI 历史上一遍又一遍地上演。在计算机国际象棋中,研究者精心编码开局定式和残局策略,结果被暴力搜索的深蓝击败;在语音识别和计算机视觉中,人们手工设计特征提取器,结果被从数据中自己学特征的深度网络全面取代。围棋更是登峰造极——研究者投入巨大精力利用人类知识来减少搜索量,而 AlphaGo Zero 干脆去掉一切人类输入,从零自我对弈,反而下得更好。
萨顿总结道:研究者总是试图让系统按照他们认为人类心智运作的方式去工作,但最终这被证明是适得其反的。 真正推动突破的两大元技术——搜索和学习——之所以有效,恰恰是因为它们能随算力的增长而无限扩展。
而"学习"最自然、最原始的形态是什么?不是坐在教室里听课,不是阅读标注好的数据集,而是像所有生物一样:在真实世界中行动、观察后果、调整行为——也就是试错。
想一想,你人生中最早学会的那些技能——走路、说话、骑自行车——有哪一个是靠"读教材"学会的?没有人给你列一张"左脚先迈、重心前移"的步骤清单。你只是不断地尝试,摔倒,再爬起来,直到某一天身体自己记住了该怎么做。
以骑自行车为例。假设你要教一个小孩学会骑车,你会怎么做?

你不会先递给他一本《自行车物理学与平衡方程》,也不会在他上车前规定"当车身向左倾斜 5 度时右脚施力 10 牛顿"——这些精确的知识对他的大脑毫无用处。你只是扶着后座,鼓励他自己去蹬。摔了,擦伤的膝盖就是负面反馈;稳了,迎面吹来的风就是奖励。几次下来,他的大脑在试错中自动学会了调整重心。
这种能力——在未知环境中通过试错来学习,以最终的回报为导向——是所有生物最本能的学习方式。可奇怪的是,过去十年的人工智能恰恰绕开了它。我们教会了机器认猫认狗、翻译语言、生成图片,用的全是同一种方法:给它成千上万个标注好的正确答案,让它照着学。但当问题从"识别"变成"决策"——让机械臂抓取水杯,让 AI 在星际争霸中打败职业选手,或者让大语言模型学会得体地回答问题——你根本无法为每一步标注出标准答案。
面对这些需要在动态变化中做连续决策的难题,强化学习(Reinforcement Learning, RL)提供了一套截然不同的思路:不告诉 AI 怎么做,只告诉它什么好、什么不好,剩下的让它自己摸索。从 Q-Learning 到 DQN,从 PPO 到 DPO 和 GRPO——强化学习的每一次进化,都在不断拓宽人工智能的能力边界。
本书将带你亲手用代码重走这段旅程。从最基础的倒立摆(CartPole),一路走到如何用 RL 激发大语言模型的推理能力。这不仅是一门技术,更是一种理解智能如何涌现的全新视角。
强化学习的定义
上一节我们用"教小孩骑自行车"的例子建立了对强化学习的直觉。现在,让我们把它变得更精确。
强化学习是一类解决序列决策问题的计算方法。一个智能体(Agent) 处在某个环境(Environment) 中,在每个时刻观察环境的状态(State),据此选择一个动作(Action);环境接收动作后转移到新状态,并给智能体一个标量奖励(Reward) 作为唯一的反馈信号。智能体的目标:最大化整个交互过程中的累积奖励。
注意三个关键要素:序列决策(连续做多步选择,当前决策影响未来),唯一的反馈是奖励(不像监督学习有标准答案,智能体只知道"得了多少分"),目标是累积回报(不贪心单步奖励,着眼长期)。
核心循环
强化学习的交互过程是一个不断重复的循环:

- 智能体观察到当前状态 ,选择动作
- 环境执行动作,转移到新状态 ,返回奖励
- 回到第 1 步
循环产出一条轨迹:
这里有几个重要的区分。状态(State) 是对环境的完整描述(如国际象棋棋盘),观测(Observation) 是部分描述(如超级马里奥只能看到角色附近画面)——本书通常用"状态"统称两者,代码中你会看到 obs 这个变量名。动作空间分两类:离散的(如马里奥只有左、右、跳、蹲 4 个动作)和连续的(如机械臂关节角度可取任意实数),不同类型需要不同算法。
关于奖励,如果只看眼前的单步奖励,智能体就会变得非常“短视”。因此,智能体真正关心的目标是累积回报(Return) ——也就是从当前时刻 开始,直到一局游戏结束,未来所有奖励的总和。
但是,把未来的奖励直接加起来有一个问题:越远未来的奖励越不确定。就像迷宫中的老鼠,眼前的小奶酪马上就能吃到,但远处猫旁边的大奶酪却充满风险。为了体现“未来的 1 分不如现在的 1 分值钱”,我们引入了折扣因子(Discount Factor) (取值在 0~1 之间,通常设为 0.95~0.99)。
有了折扣因子,未来的奖励在加和时就会被打个折扣,离得越远,折扣越狠。我们来看看这个公式:
公式看起来有点长,但拆开看非常直观:
- 是马上就能拿到的奖励,不打折(乘上 )。
- 是走两步才能拿到的奖励,打一次折,乘上 。
- 是走三步才能拿到的奖励,打两次折,乘上 。
- 依此类推,未来的第 步奖励,就要乘上 。因为 是个小于 1 的小数(例如 0.9),所以 会随着步数的增加而越来越小(0.9, 0.81, 0.729...)。
所以, 的大小决定了智能体的”视野”。让我们用一个简单的例子来算一笔账:

智能体面临两条路径:
- 即时奖励:距离近,奖励是 +1。不需要打折,实际价值就是 1 分。
- 远期奖励:距离远,奖励是 +10,但伴随风险。因为隔了步数,奖励要被打折,假设要乘上 (打了 3 次折)。
这个时候, 的取值就成了决定性因素:
- 如果 (目光短浅):远期奖励在智能体眼里的价值变成了 分。0.01 分远不如眼前的 1 分,于是智能体选择即时奖励。
- 如果 (目光长远):远期奖励在智能体眼里的价值变成了 分。7.29 分远大于眼前的 1 分,于是智能体愿意抵御眼前的诱惑,选择远期奖励。
整个 RL 大厦建立在一个哲学立场——奖励假设——之上:所有目标都可以描述为"最大化期望累积奖励"。只要能把"好"和"坏"量化成数字信号,RL 就有办法让智能体学会。
任务类型也有两种:回合制(Episodic) 有明确的起点和终点(一局超级马里奥、一局 CartPole),持续性(Continuing) 没有终点(自动化股票交易)。本书的实验都是回合制,方便用”每回合得分”衡量进展。
两条路线
所有 RL 算法都在回答同一个问题:如何选择动作以最大化累积回报?所谓累积回报 ,就是智能体从时刻 起获得的所有折扣奖励之和:
它衡量的是"一局游戏从头到尾总共拿了多少分",而不是某一步的即时奖励。回答这个问题有两条截然不同的路线,在此之前先认识一个核心概念——策略(Policy),它是智能体的"大脑",即给定状态输出动作的函数。训练的终极目标就是找到最优策略 。策略分两种:确定性策略对同一状态永远输出同一动作(),随机性策略输出动作的概率分布()——后者天然兼顾探索,因为总有小概率去尝试非首选动作。
那么,怎么找到最优策略?有两条截然不同的路线:
路线一:基于价值(Value-Based)——先搞清楚每个动作"值多少分",再选最高分。想象你在走迷宫,每到一个岔路口,你都能看到一块牌子:往左走预计总共能拿 80 分,往右走预计总共能拿 30 分——于是你选往左。这块"牌子"就是动作价值函数(Q 函数),代表在这个状态选了这个动作后,未来一共能拿多少分:
你肯定会疑惑:如果我还没走到终点,怎么知道未来能拿多少分?这些 Q 值到底是怎么算出来的?
这正是强化学习最精妙的地方:靠“先瞎猜”,然后“一步步纠错”。而允许我们这么做的理论基石,就是马尔可夫决策过程(MDP)。
MDP 的核心假设是“未来只依赖当前,与过去无关”。因为有这个地基,我们可以玩一个数学魔术,把无限长的未来从中间切断——这就是贝尔曼方程(Bellman Equation)。它告诉我们,Q 值不用非得玩到底才能算,它可以直接拆解成两部分: 当前的 Q 值 = 眼前的即时奖励 + 下一步的 Q 值
有了这个等式,算法的实际运作就极其直观了: 一开始,所有岔路口牌子上的分数都是乱写的(随机初始化)。你随便走了一步,拿到 1 分奖励,并看到下一个路口的牌子上写着 10 分。你立刻就明白了:“哦,刚才那一步的真正价值大约是 1+10=11 分!”于是你掏出笔,把刚才路口牌子上的分数改成了 11。
通过这样在迷宫里不断试错,用“下一步的牌子”来纠正“上一步的牌子”,所有 Q 值最终都会收敛到真实的分数(满足贝尔曼最优方程)。这时候,永远选分数最高的动作,最佳策略自然就出来了:。这一路线的代表算法是从经典的 Q-Learning 发展到深度学习时代的 DQN。
路线二:基于策略(Policy-Based)——跳过打分,直接学"看到什么就做什么"。还是走迷宫的例子,你不给路打分了,而是反复走很多次迷宫:走到终点就加强沿途每个选择的信心,掉进陷阱就削弱。走得多了,好动作的概率自然上升,坏动作的概率自然下降。形式化地说,策略 由参数 定义,我们通过最大化期望回报来优化它:
这一路线的代表算法是从基础的 REINFORCE 发展到当今大模型对齐广泛使用的 PPO。
两条路线各有短板,而它们的短板恰恰指向一个 RL 的核心困境——探索与利用(Exploration vs. Exploitation):利用已知最好的动作稳拿奖励,还是冒险尝试未知动作以发现更好的策略?就像选餐厅,每天都去同一家好吃的店(利用),可能永远错过街角那家更好的(探索);但每天试新店(过度探索),又经常踩雷。探索太多浪费资源,太少则陷入次优、永远进步不了。路线一擅长打分但不擅长探索,路线二擅长探索但打分不够准。
Actor-Critic 把两者拼在一起——用路线一的方法训练一个 "评委"(Critic) 来评估每个动作的好坏,再用路线二的方法训练一个 "演员"(Actor) 来选动作。具体来说:
- Critic(评委) 是一个价值函数,负责回答"在状态 下执行动作 ,到底好不好?"。它不直接选动作,而是给动作打分——比如告诉你"这一步预计能拿 +5 分"。打分越准,演员就知道哪些方向值得尝试、哪些该避开。
- Actor(演员) 是一个策略函数 ,负责回答"在状态 下,该做什么?"。它根据评委的打分来调整自己的行为:被评委给出高分的动作,以后多选;被打低分的,以后少选。
两者形成良性循环:评委的评分越准,演员的进步就越快;演员尝试的新动作越多,评委看到的数据就越丰富,评分也越准。这就像一个实习演员和一位老导演之间的关系——导演指出表演中的问题,演员据此改进,而演员的新尝试又让导演对"什么是好表演"有了更深的理解。
在强化学习的术语中,根据是否学习环境的运作规律,算法还可以分为另外两类:
- 无模型(Model-Free)方法:智能体不关心环境内部是怎么运作的,只关心“我这么做能拿多少分”。无论是基于价值、基于策略还是 Actor-Critic,只要它是通过在环境中疯狂试错来积累经验的,都属于 Model-Free。就像你玩超级马里奥,你不需要知道游戏引擎的代码,只要多死几次自然就学会了怎么跳。
- 基于模型(Model-Based)方法:智能体会先在脑海中构建一个“世界模型”(Model of the environment),预测“如果我这么做,环境会变成什么样”。比如 AlphaGo 下围棋时,它知道围棋的规则(模型),可以在脑海中推演几步之后的棋局,然后再做决定。
本书主要聚焦于 Model-Free 算法(如 DQN, PPO, DPO 等),因为它们更通用,且在当今的大语言模型对齐和复杂环境中占据绝对主导地位。

最后一个问题:这些"打分表"和"行为手册"具体长什么样?简单环境下可以是一张小表格,查表就行。比如一个只有 16 个格子的小迷宫,你只需要一张 16 行的表,每行写上"在这个格子里往左/往右分别值多少分"——这就是经典 Q-Learning 的做法:
| 状态 | ||||
|---|---|---|---|---|
| 0.1 | 0.8 | 0.3 | -0.2 | |
| 0.7 | 0.2 | 0.5 | 0.0 | |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
查表就能做决策:在 选"往右"(0.8 最高),在 选"往左"(0.7 最高)。策略表也类似,每行写"在这个格子往各方向走的概率"。
但像 Atari 游戏那样,一帧画面就有 个像素,每个像素取 128 种颜色——可能的状态数远超宇宙中的原子数,表格根本装不下。深度强化学习(Deep RL) 的做法是用神经网络来"压缩"这张无限大的表格:网络以状态(如游戏画面)为输入,以 Q 值或动作概率为输出。网络不需要逐行存储,而是通过权重来泛化——见过相似的画面,就能猜出差不多的分数。
- 如果神经网络学的是"打分表"(输入状态,输出每个动作的 Q 值),它就是 Value-Based(如 DQN);
- 如果学的是"行为手册"(输入状态,输出动作的概率分布),它就是 Policy-Based(如 REINFORCE);
- 如果同时学两者——一个网络打分,一个网络选动作——它就是 Actor-Critic(如 PPO)。
本书所有算法都属于 Deep RL。
大模型时代
前文讨论的强化学习框架——智能体、环境、奖励——是在游戏和机器人等传统场景中发展起来的。一个自然的疑问是:当这套框架遇到大语言模型时,会发生什么?
2016 年,AlphaGo 击败李世石,证明了强化学习在完美信息博弈中的威力。但真正让 RL 走向大众视野中心的,是 2022 年 ChatGPT 的发布——人们发现,让大模型从"能说话"变成"说好话"的关键技术,正是强化学习。
在游戏环境中,奖励信号是清晰且自动的:吃金币 +1 分,掉坑里 -100 分。但当我们要让 AI 学会"好好说话"时,问题来了:什么是"好"的回答?礼貌?有用?安全?人类偏好如此复杂,环境根本无法自动判断一句回答该得几分。
RLHF(Reinforcement Learning from Human Feedback) 给出了第一套解决方案,通过三个阶段完成从"能说话"到"说好话"的转变:
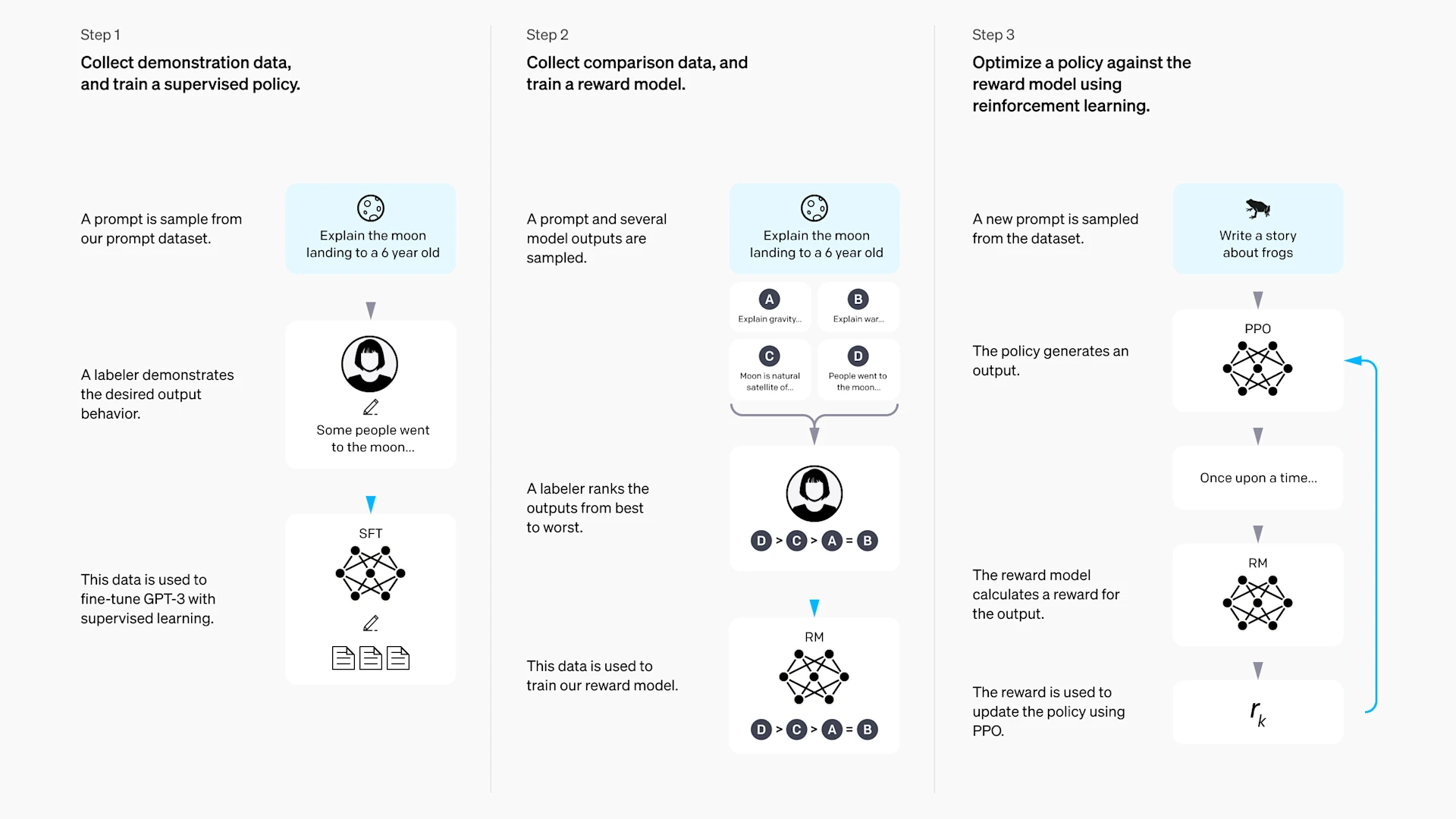
- 监督微调(SFT):用人类撰写的高质量对话示例微调模型,让它学会基本的对话格式。
- 奖励模型训练(RM):让人类对模型的多个回答进行排序,训练一个能"模仿"人类偏好的打分模型。
- 强化学习优化(RL):用 PPO 等算法,以奖励模型的分数为信号,进一步优化模型的回答策略。
大模型时代的 RL 演化出了两条关键路线。路线一:基于偏好的对齐(RLHF / DPO)——当判断标准是"人类是否喜欢"(语气是否礼貌、回答是否安全)时,环境无法自动给分。我们先用人类标注训练一个奖励模型来"模仿"人类偏好,再用它指导 RL 训练。DPO 则更进一步,巧妙地将奖励信号"隐藏"在策略概率比中,绕过了显式的奖励模型——你将在第 8-9 章亲手实践这条流水线。路线二:基于可验证奖励的纯强化学习(RLVR)——当转向数学、代码或复杂推理任务时,答案的对错是客观可验证的。DeepSeek-R1-Zero 等前沿工作证明:不再需要预先进行 SFT 或训练奖励模型,只要给模型一个基于规则的反馈,纯粹的强化学习就能驱动基础模型自发涌现出长思维链(Chain-of-Thought)和强大的推理能力。这是当前 AI 迈向 AGI 的最前沿探索之一。
还记得前文介绍的 PPO 吗?在大模型时代,它从游戏控制的集大成者,变成了整个 LLM 对齐工业的基石。但 PPO 需要一个额外的 Critic 网络来评估动作好坏,对于大模型来说这意味着巨大的计算开销。GRPO(Group Relative Policy Optimization) 应运而生——它用组内相对优势替代 Critic 网络,在同一次生成的多个回答之间比较优劣,直接从中学习"哪个更好"。这一简化让 RL 训练的成本大幅降低,成为开源社区对齐大模型的主流选择之一。
未来
强化学习正在从"让 AI 做单步决策"走向"让 AI 完成完整任务",这条路上有三个值得关注的方向。
第一个方向是智能体强化学习(Agentic RL)。当前的大语言模型本质上是"单轮问答机器"——你问一句,它答一句。但现实中的任务往往需要多轮交互:规划旅行时要搜索多个网站比价,调试代码时要反复运行测试、阅读报错、修改再验证。Agentic RL 正是训练 AI 在环境中连续行动、调用工具、根据中间结果动态调整策略,最终完成长周期的复杂任务。这是从"对话模型"到"自主智能体"的关键跨越,你将在第 8 章深入实践。
第二个方向是多模态与具身智能。RL 正在突破纯文本的边界:视觉-语言模型(VLM)让 RL 的触角延伸到图像理解和视觉推理,而具身智能(Embodied AI)则将 RL 推向物理世界——让机器人在真实环境中通过试错学会行走、抓取和操作。其中最大的挑战在于仿真与现实的差距(Sim-to-Real Gap):在虚拟环境中训练好的策略,到真实世界可能完全失效。域随机化(Domain Randomization)等技术正在缓解这一问题,而 Model-Based RL 和自我博弈(Self-Play)也在打开新的可能性。
第三个方向或许也是最终的走向——通向更通用的智能。回到萨顿的"苦涩的教训":通用方法终将胜出。从游戏到语言,从语言到视觉,从视觉到物理世界,强化学习的每一步扩展都在验证同一个判断——让智能体自己通过试错来学习,比人类手动编码知识更有效。而这条路的尽头,或许就是 AGI。
以上是强化学习的概念框架。初次接触难免觉得术语密集,不必在此停留太久——后续各章会通过代码和实验逐一展开,每遇到一个概念,你都会有具体的动手经验与之对应。
关于本书
2016 年,AlphaGo 击败李世石,强化学习第一次震撼公众。2022 年 ChatGPT 发布,人们发现 RL 正是让大语言模型从"能说话"变成"说好话"的关键技术。从 DeepSeek-R1 到各类开源对齐模型,RLHF、DPO、GRPO 等算法已经深刻地重塑了整个 AI 行业。
然而,市面上的学习资源严重滞后于行业实践。主流教程对 RL 一笔带过,专门的 RL 教材又停留在传统框架,对 PPO、DPO、GRPO 只字不提。一个想要理解 RLHF 流程的工程师,不得不在经典教材和最新论文之间艰难地自行搭建桥梁。我们着手写这本书,就是为了填补这道鸿沟。
这本书代表了我们的尝试——让现代强化学习变得平易近人,用代码、数学和直觉的融合来教会人们核心概念。
一种"先动手、后理论"的学习路径
许多教科书先讲完 MDP 的全部性质,再讲贝尔曼方程,最后才允许你碰一行代码。在这本书中,你将从第一章的第一行代码开始训练一个智能体。当你亲眼看到 CartPole 的小车从摇摇晃晃到稳稳站立,亲手用 DPO 让一个大模型学会"说好话",再回过头理解背后的数学时,学习过程会更加自然,理解也会更加持久。
每一章都遵循一个四步循环:先给你一段可运行的代码,让你获得直接经验;然后引导你关注训练曲线上的关键现象;接着在具备直觉的基础上讲解数学原理;最后用理论重新解读之前的现象,完成从直觉到形式化的闭环。
代码与理论并重
本书的每一章都包含可运行的代码示例。强化学习中的许多直觉只能通过试错来建立——调一调学习率,观察 reward 曲线的振荡;改一改 clip 参数,看看策略是否会崩溃。这些经验无法仅靠阅读公式来获得。
内容和结构
全书大致可分为四个部分,在下图的核心脉络中用不同的颜色呈现:

上图是全书算法的主线。第一部分(灰色)带你快速上手,在 CartPole 和 DPO 上获得第一手感受。第二部分(蓝色)构建核心理论:左侧蓝色分支是 Value-Based——先估计每个动作能得多少分,再选得分最高的;右侧橙色分支是 Policy-Based——跳过打分,直接学习在什么状态下该做什么动作。两条路线在 Actor-Critic 处合流,由此长出 PPO。第三部分(绿色)进入大模型时代:PPO 正是后续所有大模型对齐与智能体算法的骨架,由此延伸出 RLHF、DPO、GRPO 和 Agentic RL。第四部分(紫色)展望前沿,探索多模态 RL 与具身智能。
以下是各章内容的详细介绍。
第一部分包括快速入门。
- 第 1 章带你零基础运行第一个 RL 训练脚本,在 CartPole 倒立摆上获得"AI 能自己学会一件事"的第一手感受。
- 第 2 章将场景从"游戏控制"切换到"语言对齐",用一个完整的 DPO 微调流程让大语言模型学会"不盲从用户",体验现代 RL 如何直接作用于大模型。
接下来的五章集中构建强化学习的理论与方法体系。
- 第 3 章讲解强化学习过程的基本定义,从多臂老虎机中的探索和利用问题出发,引入马尔可夫决策过程(MDP),逐步建立状态、动作、奖励、转移和长期回报的形式化框架,并推导出贝尔曼方程。
- 第 4 章进入深度强化学习,展示 DQN 如何将 Q-Learning 从一张小表格搬进神经网络,通过经验回放和目标网络让智能体直接从 Atari 游戏像素中学会决策——这也是深度学习与强化学习融合的里程碑。
- 第 5 章转向另一条路线——策略梯度方法,从 REINFORCE 到带基线的策略梯度,理解策略优化的基本范式。
- 第 6 章搭建 Actor-Critic 架构,引入优势函数和 Critic 训练方法,让 Value-Based 和 Policy-Based 两条路线在此汇合。
- 第 5 章聚焦 PPO,深入裁剪(Clipping)和广义优势估计(GAE)两大核心机制,在月球着陆器上实践稳定训练的艺术——PPO 既是游戏控制时代的集大成者,也是后续所有大模型对齐算法的出发点。
第三部分讨论大模型时代的对齐与智能体算法。
- 第 6 章串联 SFT → RM → RL 三阶段,构建一条完整的 RLHF 工程流水线,覆盖数据工程、奖励函数设计、训练稳定性控制和自我博弈数据飞轮等实际工作中的核心挑战。
- 第 7 章介绍后训练对齐的前沿算法。从数学上揭示 DPO 如何将奖励信号"隐藏"在策略概率比中绕过奖励模型;随后介绍 GRPO 如何用组内相对优势进一步省去 Critic 网络。重点探讨 RLVR(基于可验证奖励的 RL),解析如何用规则反馈替代人工标注,追踪 DeepSeek-R1-Zero 纯强化学习驱动推理能力(CoT)自发涌现的最新进展。
- 第 8 章聚焦 Agentic RL(智能体强化学习)。探讨如何用 RL 训练能在环境中连续行动、调用工具、多轮交互的智能体,涵盖工具调用、轨迹合成、信用分配和工业界实践(如 Deep Research Agent)。这是从"对话模型"到"自主智能体"的关键跨越。
第四部分将 RL 拓展到视觉、物理世界与前沿方向。
- 第 9 章把 RL 从纯文本推进到视觉-语言模型(VLM),分析多模态 RL 中视觉幻觉、奖励归因等独特问题,并介绍 Open-R1 等前沿框架在视觉推理与生成上的探索。
- 第 10 章展望强化学习的未来趋势。不仅探讨从离散动作到连续动作控制,以及 Sim-to-Real 域随机化等具身智能的核心挑战,还覆盖了 Model-Based RL、自我博弈(Self-Play)、LLM 多智能体协作与离线 RL(Offline RL)等将彻底改变智能系统形态的前沿方向。
目标读者
本书面向学生、工程师和研究人员。不需要过往的深度学习或机器学习背景,只需基本的 Python 编程能力、线性代数(矩阵运算)、微积分(偏导数、链式法则)和概率论基础(期望、条件概率)。大多数时候,我们会优先考虑直觉和想法,而不是数学的严谨性。
环境与硬件要求
本课程的实验代码兼容主流操作系统:
- Linux(推荐):Ubuntu 20.04 及以上版本,对深度学习生态支持最为完善。
- Windows:通过 WSL2(Windows Subsystem for Linux 2)即可运行全部实验,安装简便。
- macOS:Apple Silicon(M1/M2/M3/M4)和 Intel Mac 均可运行大部分实验。
GPU 与显存需求按三个层级划分:
| 层级 | 显存需求 | 覆盖范围 | 典型硬件 |
|---|---|---|---|
| 入门实验 | CPU 即可 / 4GB+ 显存 | CartPole、Atari、策略梯度等经典 RL 实验 | 集成显卡、GTX 1650 等 |
| 核心实验 | 24GB 显存 | DPO 对齐、PPO 训练、GRPO 等大模型相关实验 | RTX 3090、RTX 4090、A5000 等 |
| 大型项目 | 80GB 显存 | 少量大规模模型训练(如 7B+ 模型的完整 RLHF 流水线) | A100、H100 等 |
大部分实验控制在 24GB 显存内即可完成,一张消费级显卡(如 RTX 3090 / 4090)足以覆盖全书超过 90% 的动手内容。只有少量涉及大模型全参数训练的进阶项目才需要 80GB 级别的显卡。
TIP
体验本课程的成本并不高。一台普通笔记本就能跑通入门实验,一张 24GB 显存的消费级显卡足以覆盖绝大多数核心内容。
小结
- 基础理解:强化学习是最接近生物本能的学习方式——通过试错和奖励信号来优化行为,萨顿的"苦涩的教训"告诉我们,通用方法终将胜过人类手动编码的知识。
- 核心理论:RL 的理论框架围绕智能体-环境交互循环展开,价值函数和策略梯度是两条核心求解路线,Actor-Critic 将两者融合。
- 大模型时代:从 RLHF 到 DPO,从 PPO 到 GRPO 和 RLVR,强化学习已成为大语言模型对齐和推理能力涌现的关键技术。
- 未来:Agentic RL、多模态 RL 和具身智能正在将 RL 从对话推向行动、从文本推向物理世界,通向更通用的智能。
- 本书采用"先动手、后理论"的教学路径,只需基本的 Python 编程和数学基础即可开始学习。