11.4 视觉生成模型的 RL 后训练
前面几章我们先从 LLM 的文本后训练讲起:模型读一段文字,生成一段回答,RL 的目标是让它更符合人类偏好、更会推理、更少犯格式和事实错误。进入本章以后,我们把输入从纯文本扩展到图像和文本,讨论 VLM 的理解侧:模型看一张图,回答一个问题,RL 的目标是让它看得更准、答得更稳。
现在我们继续往前走一步,转到视觉 AI 的另一侧:生成。给模型一段文字,它要生成一张图,或者一段视频。
这件事表面上像“让模型画得更好看”。但在真实应用里,用户很少只要“好看”。用户真正想要的是:主体要对,数量要对,位置关系要对,细节要对,整体风格还要自然。
例如 prompt 写的是:
玻璃走廊里有三把红色雨伞,右侧墙上有一块蓝色指示牌。
模型生成了一张很漂亮的玻璃走廊,但只有两把伞,指示牌也不是蓝色。这张图应该给高分还是低分?如果只看审美,它可能很好;如果看指令遵循,它明显失败。
因此,视觉生成 RL 的核心问题是:
能不能把“生成得好”拆成可以学习、可以比较、可以优化的反馈信号?
本节沿着一次完整的生成轨迹来讲:先看视觉生成为什么比视觉问答更难写 reward,再把 Diffusion 的去噪过程翻译成 MDP,最后推到 DDPO 的策略梯度、训练步骤和 reward model 设计。
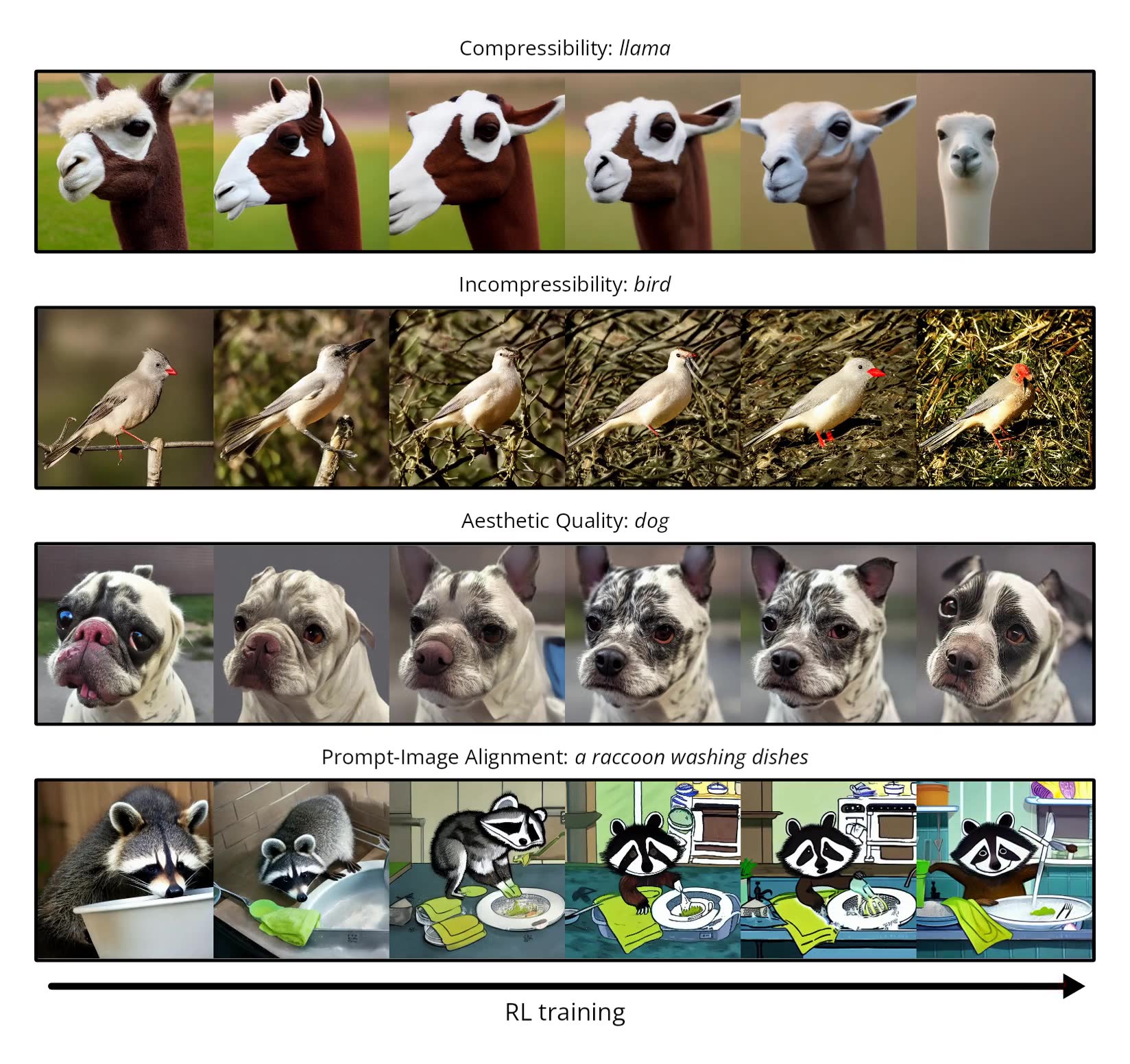
这张图对应的算法主线来自 DDPO 论文;后文把 Diffusion 写成 MDP、再用策略梯度更新去噪轨迹,也以这篇论文为核心参照[1]。
从 LLM 到 VLM,再到视觉生成:RL 迁移时到底变了什么?
更好的理解顺序不是“VLM 能不能直接迁移到生成”,而是先看一条更长的路线:
LLM 文本 RL → VLM 理解 RL → 视觉生成 RL
这三者都在使用 RL 的同一套基本语言:模型是 policy,模型输出形成 trajectory,reward 评价这条 trajectory,训练时再用 KL、clipping 或 advantage 让更新更稳定。但每往前走一步,被优化的对象都在变化。
先看 LLM。LLM 的输入是文本上下文,输出也是文本。一次回答可以看成一条 token 轨迹:
每一步 action 是“选下一个 token”。reward 可以来自人类偏好模型、规则检查、数学验证器、代码运行结果,或者格式约束。PPO、DPO、GRPO 这些方法虽然细节不同,但大多围绕“如何让文本回答更符合 reward”展开。
到了 VLM 理解侧,输入多了图像:
但很多任务的输出仍然是文本、选项、坐标或 bounding box。也就是说,模型多了视觉证据,action 却仍然经常落在 token 或结构化答案上。reward 也相对容易写:答案是否正确、框是否对齐、IoU 是否够高、推理格式是否满足要求。这就是前几节 VLM-R1 / VISTA-Gym 这类工作的核心:让模型学会利用视觉信息,而不是只靠语言先验猜答案。
再到视觉生成,事情才真正换了一个层级。模型的目标不再是“看图后回答”,而是“根据 prompt 创造一个新的视觉结果”。输出不再是一串答案 token,而是一张图、一段视频,或者更准确地说,是一条 latent / denoising 轨迹。此时 reward 也不再主要问“答案是否等于标准答案”,而是问:
- 图像是否符合 prompt?
- 数量、颜色、空间关系有没有错?
- 人类是否更偏好这个结果?
- 画面是否自然、清晰、风格一致?
- 视频里前后帧是否连贯?
可以把这三站放在一张表里:
| 阶段 | 输入 | 输出 | RL 里的 action | reward 更像什么 |
|---|---|---|---|---|
| LLM 文本后训练 | 文本 prompt | 文本回答 | 下一个 token | 偏好、规则、验证器 |
| VLM 理解后训练 | 图像 + 文本问题 | 文本、选项、框、坐标 | 主要还是 token 或结构化答案 | 答案正确性、IoU、工具验证 |
| 视觉生成后训练 | 文本 / 图像条件 | 图像、视频、latent 轨迹 | 每一步去噪转移 | 偏好、对齐、质量、细粒度约束 |
所以,视觉生成 RL 不是把前面的东西推翻,而是把同一套 RL 语言换到一个更难的对象上。
能继承的部分包括:policy gradient、advantage、KL 正则、PPO-style clipping、reward model、judge model。真正要重写的部分是 state、action、trajectory 和 reward。
这也是为什么 DDPO 这类工作会先做一件看似朴素、但非常重要的事:把 Diffusion 的去噪过程翻译成状态、动作、轨迹和奖励[1:1]。只有这一步翻译清楚了,我们才知道策略梯度到底在更新什么。
先从 Diffusion 的采样过程看起
Diffusion 模型的生成过程可以理解为“从噪声出发,逐步去噪”。
最开始,模型有一个接近随机噪声的 latent,记作 。然后模型一步一步生成:
这里 是最终图像对应的 latent。再经过 decoder,就得到用户看到的图像。
每一步去噪时,模型会看三个东西:
| 符号 | 含义 |
|---|---|
| $x_t$ | 当前还带噪声的 latent |
| $t$ | 当前去噪步数 |
| $c$ | prompt 或条件信息 |
模型要决定的是下一步 latent:
这行公式的意思是:给定当前噪声状态 、时间步 和 prompt ,模型用参数 定义一个概率分布,并从中采样下一步 。
为什么说它像 policy?因为在 RL 里,policy 的定义就是:
也就是“给定当前状态 ,选择动作 的概率分布”。
LLM 里我们很熟悉这个形式:
给定前面的 token 和上下文 ,模型选择下一个 token 。所以 token 是 action,文本上下文是 state。
Diffusion 的去噪分布也有同样的形状:
给定当前 noisy latent、时间步和 prompt,模型选择下一步 latent。于是可以把 看成 state,把 或等价的去噪方向看成 action。
当然,这句话只是在说“形式上可以看成 policy”。它还不等于已经完成 RL。只有再定义最终图像的 reward,并用这个 reward 更新 ,这个采样过程才真正变成强化学习问题。
把 Diffusion 翻译成 MDP 语言
DDPO(Denoising Diffusion Policy Optimization)的关键观察是:Diffusion 的采样过程可以被看成一个有限长度的 MDP。Black 等人的 DDPO 论文明确把 denoising 视为 multi-step decision-making problem,然后用 policy gradient 直接优化下游 reward[1:2]。
这个翻译非常重要。我们逐项来看:
| RL 里的概念 | Diffusion 里的对应 |
|---|---|
| 状态 $s_t$ | 当前 latent、时间步和 prompt:$(x_t,t,c)$ |
| 动作 $a_t$ | 采样下一步 latent,或预测去噪方向 |
| 轨迹 $\tau$ | 一整条去噪链路:$x_T,\ldots,x_0$ |
| 奖励 $R$ | 最终图像由 reward model 给出的分数 |
| 策略 $\pi_\theta$ | Diffusion 模型的去噪分布 $p_\theta$ |
因此,一次生成就像一个 episode:
在 RL 里,episode 指的是一次完整交互:从初始状态开始,智能体连续选择动作,环境连续给出下一个状态,直到任务终止为止。比如 CartPole 里,从小车和杆子被初始化,到杆子倒下或达到最大步数,是一个 episode。文本生成里,从开始 token 生成到结束 token,也可以看成一个 episode。
episode 的意义,是给“结果”划出边界。它告诉我们:哪些状态和动作属于同一次尝试,最终的好坏应该回看哪一串决策。对图像生成来说,单独看某一个中间 latent 很难判断它是不是“好图”。真正能被人类偏好模型、CLIP score、审美模型或任务 reward 打分的,通常是最后得到的 。所以我们把从纯噪声 一步步去噪到 的整条链路当成一个 episode,终止状态就是最终图像。
episode 结束以后,reward model 才看到最终图像,并给出分数:
注意这里的 不是生成模型本身,而是另一个打分模型。它的参数是 ,生成模型的参数是 。
这样一来,生成模型的目标可以写成:
这句话读作:我们希望在模型自己采样出来的轨迹上,最终图像的平均 reward 尽可能高。
DDPO:用策略梯度更新去噪策略
有了上面的 MDP 翻译,DDPO 就不神秘了。它本质上是在 Diffusion 采样轨迹上做策略梯度。
先给这段推导一个论文坐标。表里左边写的是我们马上要做的事情,右边写的是它来自哪条经典线索:
| 我们要做的事情 | 对应论文线索 |
|---|---|
| 把一次去噪生成看成一个 episode / MDP | DDPO:Black et al., 2024[1:3] |
| 高分样本提高概率,低分样本降低概率;数学上叫策略梯度 | REINFORCE:Williams, 1992[2] |
| 用 old/new logprob ratio 和 clipping,让每次更新不要迈太大步 | PPO:Schulman et al., 2017[3] |
| 用 KL 约束限制模型不要偏离参考模型太远 | DPOK:Fan et al., 2023[4] |
| 用人类偏好或审美偏好训练 reward model | Pick-a-Pic / HPS v2[5][6] |
其中最容易被术语吓到的是第二行。它的普通话版本很简单:
如果一条去噪轨迹最后生成了高分图像,就让模型以后更容易采到这条轨迹里的那些步骤;如果最后得分低,就让这些步骤以后不那么容易被采到。
问题在于,训练模型不能只说“让它更容易发生”。我们需要一个可以计算的梯度方向。REINFORCE 里的 log-derivative trick,就是把这句话变成可训练公式的那一步。
先把接下来会出现的符号对齐一下:
| 符号 | 可以先怎么理解 |
|---|---|
| $\theta$ | Diffusion 模型的参数,也就是训练时要改的东西 |
| $c$ | prompt |
| $\tau$ | 一整条生成轨迹,从 去噪到 $x_0$ |
| $p_\theta(\tau)$ | 当前模型采到这条轨迹的概率 |
| $R(\tau,c)$ | 这条轨迹最后生成图像的分数 |
| $J(\theta)$ | 当前模型的平均分数;训练目标就是让它变大 |
| $\nabla_\theta$ | “参数往哪个方向改, 会变大”的方向,中文叫梯度 |
我们先把一条去噪轨迹的概率写出来。为了简化记号,下面默认 prompt 是给定的:
这行公式有两个意思。
第一,初始噪声 通常从标准高斯分布采样,它不依赖模型参数 。第二,真正由模型控制的是每一步去噪分布 。
这个连乘也很直观:一整条轨迹要发生,必须第 步采到 ,第 步采到 ,一直到最后采到 。所以整条轨迹的概率,就是每一步概率乘在一起。
生成模型想最大化最终 reward:
其中 ,也就是 reward model 对最终图像的打分。
先用一个离散版的小例子理解它。假设同一个 prompt 下,模型只可能采出三条去噪轨迹:
| 轨迹 | 模型采到它的概率 | 最终 reward |
|---|---|---|
| $\tau_1$ | $p_1$ | $R_1$ |
| $\tau_2$ | $p_2$ | $R_2$ |
| $\tau_3$ | $p_3$ | $R_3$ |
那平均 reward 就是:
如果 的 reward 很高,我们当然希望 变大。也就是说,RL 更新的直觉不是“直接把图片像素往某个方向推”,而是“改变模型的采样概率”:高分轨迹的概率往上调,低分轨迹的概率往下调。
真实的 Diffusion 不只有三条轨迹,而是有连续、巨量的可能轨迹。把上面这个加权平均写成积分,就是:
这里的积分可以先不用想得太可怕。它就是“把所有可能轨迹的概率乘以分数,再全部加起来”。离散时是 ;连续时就写成积分。
现在对 求梯度,也就是问:模型参数往哪里改,平均 reward 会变高?
现在问题来了:这个式子里有 ,意思是“模型参数变化时,这条完整轨迹的概率怎么变化”。但训练时我们拿到的是模型采样出来的一批轨迹,不可能枚举所有轨迹。我们希望把梯度改写成一个“对采样轨迹求平均”的形式,这样就能用实际采样来估计。
这里用到一个很小的等式,叫 log-derivative trick,也叫 score-function trick。它正是 REINFORCE 这类策略梯度方法的核心技巧[2:1]:
这个等式只是把 改写成了 。原因是:
两边同时乘上 ,就得到:
它听起来像技巧,本质上只是一次代数改写。它的好处是:公式里重新出现了 ,而这正好表示“从当前模型里采样轨迹”。于是我们就能用实际采样出来的轨迹估计梯度。
代回去:
也就是:
这一步很关键,因为它把一个难处理的问题变成了可以采样估计的问题。训练时只要做三件事:
- 用当前 Diffusion 模型采样一条轨迹 ;
- 用 reward model 给最终图像打分,得到 ;
- 看这条轨迹在模型下的 log probability,也就是 ,然后按 reward 的高低调大或调小它。
所以,策略梯度不需要对 reward 本身求导。reward model 可以是不可微的,也可以是一个黑盒打分器;我们只需要知道“这条轨迹得了多少分”。DDPO 利用的正是这个性质:reward 可以来自美学模型、压缩率、VLM feedback 或其他不可直接反传的目标[1:4]。
接下来展开轨迹的 log probability:
为什么要取 log?因为原来的轨迹概率是一串概率的乘积。乘积很长时不好处理;取 log 以后,乘法会变成加法:
所以整条轨迹的 log probability,就等于每一步 log probability 加起来。
由于 不依赖 ,求梯度时它会消失:
所以最朴素的策略梯度就是:
这就是 REINFORCE 在 Diffusion 轨迹上的形式[2:2]:如果某条去噪轨迹最后拿到高 reward,就提高这条轨迹中每一步采样动作的概率;如果 reward 低,就降低它们的概率。Black 等人的 DDPO 论文就是把这条思路搬到 Diffusion 的去噪轨迹上[1:5]。
Baseline 和 advantage 为什么可以减?
直接用 更新会有很大方差。一个 prompt 可能天然更容易生成高分图,另一个 prompt 可能天然更难。我们更关心的是:这次采样结果是否比同类样本更好。
因此可以减去一个 baseline :
这里的 叫 advantage。它不是问“这张图绝对分数是多少”,而是问“它比参考水平好多少”。如果 reward 是 8 分,baseline 是 6 分,advantage 就是 +2,说明这次生成比预期好;如果 reward 是 5 分,baseline 是 6 分,advantage 就是 -1,说明这次生成比预期差。
那为什么可以减 baseline?直觉是:如果给同一组样本的分数都减去同一个常数,谁比谁好这件事没有变。训练真正需要的是“相对更好”还是“相对更差”。
数学上也可以验证它不会改变期望梯度。我们只需要证明:被减掉的 baseline 那一项,平均起来等于 0。
这里把 提到外面,是因为同一个 prompt 下它是固定数,不依赖具体采样动作。再用同一个 log-derivative trick:
最后一行为什么是 1?因为 表示“所有可能轨迹的概率加起来”,概率总和必然是 1。1 对参数求梯度还是 0。所以,减掉不依赖具体动作的 baseline,不会改变平均更新方向,只会让更新更稳定。
实际训练里, 可以有几种常见做法:
| Advantage 做法 | 含义 |
|---|---|
| $R-\bar{R}$ | 减去同一 batch 的平均 reward |
| $R-b(c)$ | 减去 prompt 级别的历史平均 reward |
| $R-V_\psi(x_t,t,c)$ | 减去 value model 对当前状态的预测 |
| normalize 后的 reward | 对 batch reward 做标准化,让尺度更稳定 |
加入 advantage 后,DDPO 常用的策略梯度可以写成:
如果只用终局 reward,那么每一步可以共享同一个 。如果训练了 value model,也可以给不同时间步不同的 。
这和 Diffusion 的 log probability 怎么对应?
在很多 Diffusion 实现中,每一步反向转移可以写成一个高斯分布:
这里 是模型预测出来的去噪均值, 是这一步的噪声尺度。DDPO 的实现需要记录每一步动作的 log probability,本质上就是在这个反向转移分布上取 logprob[1:6]。于是这一动作的 log probability 近似是:
这行公式的意思也很朴素:如果实际采样出来的 离模型预测的均值 很近,平方距离就小,log probability 就高;如果离得很远,平方距离就大,log probability 就低。
这解释了伪代码里的 step.logprob 是什么:它不是一句抽象的 RL 符号,而是当前模型在第 步采样出这个 的对数概率。
从最大化目标到最小化 loss
深度学习框架通常最小化 loss,而策略梯度是在最大化 。所以实现时会写成负号:
最小化这个 loss 等价于最大化策略梯度目标。直观地看:
| 情况 | loss 会推动什么 |
|---|---|
| $\hat{A}_t>0$ | 提高这一步采样动作的 log probability |
| $\hat{A}_t<0$ | 降低这一步采样动作的 log probability |
| $\hat{A}_t\approx 0$ | 基本不更新这一步 |
这里和第 5 章 REINFORCE 的思想完全一致,只是动作从“选择 token”变成了“选择下一步 latent”。
为什么还需要 KL 约束?
如果只最大化 reward,模型很容易走偏。原因很简单:reward model 本身并不完美。模型可能找到一些 reward model 喜欢、但人类并不真正喜欢的模式。
所以实际训练常常保留一个参考模型 ,并惩罚当前模型偏离它太远。DPOK 也把“policy optimization + KL regularization”作为 text-to-image diffusion RL 微调的核心结构[4:1]:
这个式子可以分成两部分理解:
| 项 | 作用 |
|---|---|
| 策略梯度项 | 让高 reward 的采样轨迹更可能出现 |
| KL 项 | 限制模型不要为了追 reward 而远离原始模型 |
这和 RLHF、DPO、GRPO 里的思想相同:让模型变好,但不要把模型训飞。
DDPO 的最小训练流程
上面的推导说明了“为什么可以更新”。现在再把训练过程拆开看清楚:一次 DDPO update 里,数据是怎么从 prompt 走到 loss 的。
可以先记住一句话:
DDPO 不是拿已有图片做监督学习,而是让当前模型自己生成图片,再用 reward 判断这些生成结果好不好,最后把好坏信号回传到采样轨迹上[1:7]。
这也是它和普通 diffusion fine-tuning 的核心区别。普通监督微调给模型看“应该生成什么”,DDPO 给模型看“你自己生成的这些结果里,哪些更值得变得更可能”。
Step 1:取一批 prompt
第一步不是取图片,而是取 prompt:
其中 是 batch size, 是第 个 prompt。
prompt 数据的质量会直接影响训练方向。如果 prompt 太简单,模型可能只学会提高通用美学分;如果 prompt 里有数量、颜色、位置、关系等细粒度约束,reward model 才有机会训练模型的指令遵循能力。
实践中,一个好的 prompt batch 往往会混合几类样本:
| Prompt 类型 | 训练作用 |
|---|---|
| 简单场景 prompt | 稳定基础生成质量 |
| 多属性 prompt | 训练颜色、材质、数量等细节 |
| 空间关系 prompt | 训练左右、上下、遮挡、相对位置 |
| 长指令 prompt | 训练复杂条件下的指令遵循 |
| 评测集风格 prompt | 让训练目标和最终评测更一致 |
这一步看似普通,但很关键:RL 只能优化模型在这些 prompt 分布上的行为。如果 prompt 分布太窄,模型很容易只在窄场景里变好。
Step 2:用当前模型做 rollout
第二步是用当前 Diffusion 模型生成图片。RL 里通常把这一步叫 rollout,意思是让策略自己跑一条轨迹。
对每个 prompt ,模型从噪声 开始,采样一整条去噪链:
这里有一个容易被忽略的细节:训练时不能只保存最终图像,还要保存每一步去噪的关键信息。
| 要保存的内容 | 为什么要保存 |
|---|---|
| $x_t$ | 之后要重新计算这一步的 log probability |
| $x_{t-1}$ | 这是第 步实际采样出来的 action |
| $\log p_{\theta_{\text{old}}}(x_{t-1}\mid x_t,t,c)$ | 如果后面做 PPO-style 更新,需要 old logprob |
| 最终图像 或 decoded image | reward model 要对最终结果打分 |
为什么会出现 ?因为采样图片时用的是更新前的模型。等我们做梯度更新时,模型参数已经准备变化了。为了知道“新模型相对旧模型把这一步动作概率改了多少”,常常要保存 old logprob。
如果只做一次最朴素的 REINFORCE 更新,可以直接用采样时的 logprob。但在真实训练中,为了提高样本利用率,通常会对同一批 rollout 做多个 update epoch,这时 old logprob 就很重要。这个 old/new policy ratio 的思想来自 PPO[3:1],DDPO 里的 importance-sampling 变体也沿用了这种“固定 rollout、再用概率比修正更新”的思路[1:8]。
Step 3:用 reward model 给最终结果打分
第三步是把生成图像交给 reward model:
这里要特别注意:reward model 只负责打分,不一定参与反向传播。策略梯度需要的是“这条轨迹得了多少分”,而不是 reward 对像素或 latent 的梯度。
这也是 DDPO 相比可微 reward backprop 的一个优势:reward 可以来自很复杂的系统,比如 VLM judge、人类偏好模型、规则检查器,甚至多个模型的组合。只要最后能给出一个标量分数,就能作为策略梯度的信号。相对地,DRaFT 和 VADER 这类工作会利用可微 reward 的梯度直接反传到图像或视频扩散模型中[7][8]。
一个常见的 reward 计算流程是:
- 把 latent decode 成图像。
- 用文本-图像对齐模型检查是否符合 prompt。
- 用偏好模型或美学模型给视觉质量打分。
- 用规则或 VLM 检查数量、颜色、空间关系等硬约束。
- 合并得到最终 reward 。
这一步最怕 reward 尺度不稳定。比如有的 reward 在 ,有的 reward 在 ,直接相加会让某一项主导训练。因此实际训练常常会做 clipping、归一化或分层过滤。
Step 4:把 reward 变成 advantage
第四步是从 reward 计算 advantage。最简单的做法是 batch 内中心化:
如果还想让尺度更稳定,可以再除以标准差:
这样做以后, 表示第 张图比本 batch 平均更好, 表示它比平均更差。
为什么不直接用 ?因为绝对分数经常不好解释。某个 prompt 本身很难,生成 0.6 分已经不错;另一个 prompt 很简单,0.8 分可能只是平均水平。advantage 更关心“相对表现”,所以训练更稳。
在更完整的实现里,也可以训练一个 value model:
然后用:
这样不同时间步可以有不同的 advantage。不过在入门理解 DDPO 时,用 batch mean baseline 已经足够抓住核心。
Step 5:计算策略梯度 loss
第五步才是真正更新 Diffusion 模型。
先看最小版 REINFORCE loss。它只做一件事:把“这条轨迹的 log probability”和“这条轨迹好不好”乘在一起。
这个公式可以按三层读:
| 公式部分 | 含义 |
|---|---|
| $\log p_\theta(x_{t-1}^{(i)}\mid x_t^{(i)},t,c_i)$ | 模型在第 步采到这个去噪动作的 log 概率 |
| $\hat{A}_i$ | 第 张图比平均水平好多少 |
| 前面的负号 | 因为优化器默认最小化 loss,而我们想最大化好轨迹概率 |
如果 ,说明这张图比平均好,最小化 loss 会提高这条轨迹里每一步动作的 log probability。如果 ,说明这张图比平均差,最小化 loss 会降低这些动作的 log probability。
很多实现还会使用 PPO-style 的重要性比率。这个 ratio 和后面的 clip objective 对应 PPO 论文的核心稳定化设计[3:2]:
它表示:新模型相对旧模型,给同一个去噪动作的概率提高了多少。比如 ,表示新模型让这个动作大约更容易发生 20%;,表示新模型让它更不容易发生。实现里常用 logprob 相减再 exp,只是因为 logprob 更稳定、也更容易从采样过程里保存下来。
然后可以写出 clipped objective:
clip 的作用是限制一步更新太猛。假设 ,那么 ratio 通常会被限制在 附近。也就是说,就算某张图 reward 很高,也不允许新模型一次性把某个动作的概率放大太多。
这个公式里的 min 也可以这样读:当更新方向有利时,只允许它带来有限收益;超过 clip 范围以后,继续放大 ratio 不会让目标函数变得更好。这样模型就不会因为一小批高分样本而突然偏移。放到 Diffusion 里理解,就是不要让一次 reward 更新把去噪分布从原始模型附近推得太远;KL 正则和 ratio clipping 都是在控制这件事[3:3][4:2]。
Step 6:加 KL 正则并更新参数
最后一步是把策略梯度 loss、KL 正则和其他稳定项合在一起:
其中:
通常是 RL 开始前的基础 Diffusion 模型。它像一个锚点,防止模型为了追求 reward model 的偏好而偏离太远。
KL 这一项可以先理解成“两个概率分布的距离”。如果当前模型在某一步给出的去噪分布,和参考模型很接近,KL 就小;如果当前模型为了追 reward,给出了很不一样的分布,KL 就大。 控制这个惩罚有多重: 大,模型更保守; 小,模型更敢追 reward。
到这一步,才执行标准的反向传播:
- 计算总 loss。
loss.backward()得到梯度。- 对梯度做 clipping,避免爆炸。
optimizer.step()更新 Diffusion 模型。- 进入下一批 prompt,重复 rollout 和 update。
把上面六步合起来,可以得到一个更接近真实训练的伪代码。它不是某个仓库的逐行复刻,而是把 DDPO 的 rollout/reward 更新[1:9]、PPO 的 clipped objective[3:4] 和 DPOK 强调的 KL 约束[4:3] 放在同一个最小训练框架里:
for prompts in prompt_loader:
# Step 1-2: rollout with the current policy
with torch.no_grad():
trajectories = diffusion.sample_trajectories(
prompts,
return_states=True,
return_actions=True,
return_logprobs=True,
)
old_logprobs = trajectories.logprobs
images = decoder(trajectories.final_latents)
# Step 3: score final images
with torch.no_grad():
rewards = reward_model(prompts, images)
# Step 4: turn rewards into advantages
advantages = (rewards - rewards.mean()) / (rewards.std() + 1e-6)
# Step 5-6: update the diffusion policy
for _ in range(update_epochs):
logprobs = diffusion.logprob(
states=trajectories.states,
actions=trajectories.actions,
prompts=prompts,
)
ratio = torch.exp(logprobs - old_logprobs)
unclipped = ratio * advantages[:, None]
clipped = ratio.clamp(1 - eps, 1 + eps) * advantages[:, None]
policy_loss = -torch.minimum(unclipped, clipped).mean()
kl_loss = diffusion.kl_to(reference_model, trajectories, prompts)
loss = policy_loss + beta * kl_loss
optimizer.zero_grad()
loss.backward()
torch.nn.utils.clip_grad_norm_(diffusion.parameters(), max_norm)
optimizer.step()这段代码比前面的数学公式多了一个工程细节:采样和更新是分开的。采样时用的是旧模型,所以要保存 old_logprobs;更新时用当前模型重新计算 logprobs,再通过 ratio 判断新模型相对旧模型改了多少。
如果把 DDPO 压缩成一句工程直觉,就是:
对同一批 prompt,让模型自己生成一批样本;把生成结果按 reward 分出好坏;提高好样本去噪轨迹的概率,降低差样本去噪轨迹的概率,同时用 KL 和 clipping 防止模型偏移过猛。
Reward Model:生成 RL 的真正瓶颈
到这里,算法已经有了。但生成 RL 的困难往往不在“能不能写出策略梯度”,而在“reward 到底可信吗”。
如果 reward model 太弱,它给不出有效方向;如果 reward model 有偏,生成模型就会学到偏差;如果 reward 太复杂,不同目标之间还会互相拉扯。
视觉生成的 reward 通常来自三类信号。
第一类:人类偏好
人类偏好数据最常见的形式是成对比较。给定同一个 prompt,让用户在两张候选图之间选择更喜欢的一张。Pick-a-Pic 就是公开收集 text-to-image 用户偏好的代表数据集,HPS v2 则进一步提供了面向人类偏好的评测 benchmark 和 reward model 线索[5:1][6:1]。
Pick-a-Pic 的贡献不只是提供界面截图,而是把大规模 text-to-image 成对偏好数据整理成可训练、可评测的公开资源[5:2]。
这样的数据可以写成:
其中 是用户更喜欢的图, 是被比较后落选的图。reward model 的训练目标通常是让 的分数高于 :
这就是 Bradley-Terry 风格的偏好建模。它不要求人类给绝对分数,只要求比较两张图哪张更好。Pick-a-Pic 这类数据集正是用这种成对偏好来训练或评估图像偏好模型[5:3]。
这种信号的优点是接近真实用户偏好。缺点是成本高,而且偏好数据会继承标注人群的审美、文化和任务分布。
第二类:文本-图像对齐
文本-图像对齐检查的是:图像是否真的符合 prompt。
这可以从粗到细拆成几层:
| 层次 | 例子 | 可能的检查方法 |
|---|---|---|
| 全局语义 | 是否大体生成了指定场景 | CLIP Score、VLM 判断 |
| 对象存在 | prompt 中的关键对象是否出现 | 检测器、VLM 问答 |
| 属性匹配 | 颜色、材质、大小是否正确 | 细粒度 caption 后逐项比对 |
| 关系匹配 | 左右、上下、遮挡、交互关系是否正确 | 关系抽取、VLM judge |
| 数量匹配 | 指定数量是否正确 | 计数模型、目标检测、VLM 检查 |
这一层和前几节的 VLM RL 直接接上了。一个训练得更会看图的 VLM,可以被拿来当 captioner、judge 或 reward model,帮助生成模型判断“有没有画对”。
第三类:视觉质量
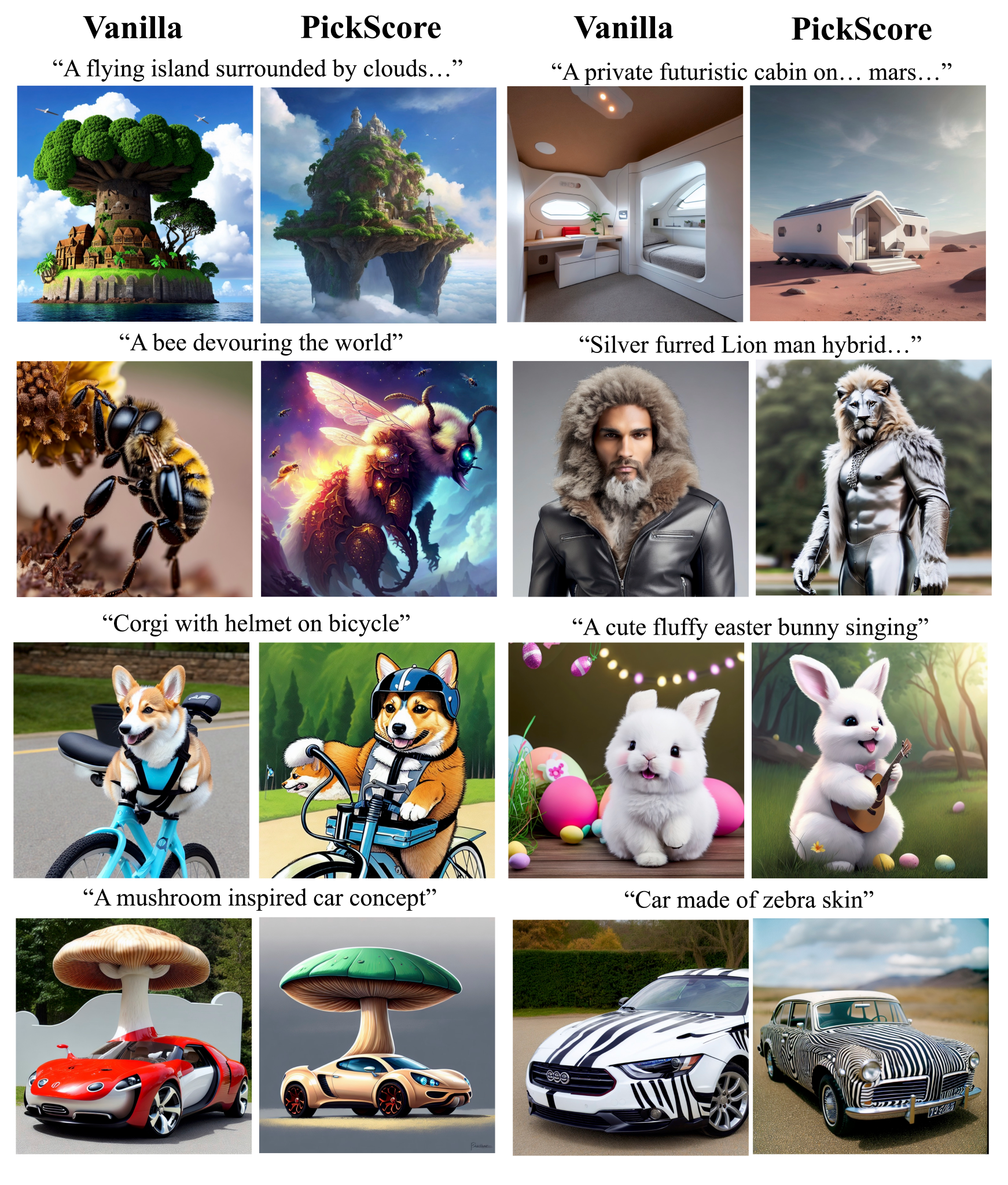
视觉质量检查的是图像本身是否自然、清晰、有良好的构图和光影。常见信号包括 aesthetic score、无参考图像质量评估、人工排序等。HPS v2 这类 benchmark 试图把“人类更偏好哪种生成结果”做成可复现的评测和模型信号[6:2]。
它很有用,但不能单独使用。因为视觉质量模型通常更容易奖励“看起来高级”的图,而不是“严格遵守 prompt”的图。生成模型如果只追这个分数,可能会变得更漂亮,但更不听话。
Reward 不是一个越复杂越好的公式
把所有 reward 加权求和很自然:
但这个公式只是起点,不是答案。多组件 reward 最大的问题是:每个分量都可能被模型投机利用,而且分量之间可能互相冲突。
一个更稳的工程做法是分层使用 reward:
- 先用规则或 VLM 检查硬约束,例如数量、颜色、对象是否满足。
- 再用偏好模型对合格样本排序。
- 最后用人工抽查或离线 benchmark 找 reward model 的盲区。
这样 reward 就不再是一个万能分数,而是一套筛选和校准流程。
两种用 reward 的方式:训练时用,还是推理时用?
有了 reward model 以后,不一定马上做 RL 微调。它有两种常见用法。
第一种是推理时使用,也叫 reward-guided sampling 或 reranking。比如同一个 prompt 生成 张图,用 reward model 排序,选择分数最高的图。这个方法简单、安全,适合先验证 reward model 是否靠谱。
第二种是训练时使用,也就是 DDPO、DPOK 这类 RL fine-tuning[1:10][4:4]。模型不只是被筛选,而是真的更新参数,把偏好内化到生成策略里。
| 方法 | 它做什么 | 优点 | 缺点 |
|---|---|---|---|
| Best-of- / reranking | 多生成几张,再用 reward model 选 | 实现简单,不改模型 | 推理成本高,能力不固化 |
| Reward-guided sampling | 采样过程中用 reward 引导方向 | 比纯 reranking 更主动 | 每次生成仍然要额外评估 |
| RL fine-tuning | 用 reward 更新模型参数 | 可以内化偏好 | 训练更贵,也更容易不稳定 |
实践中,经常先做 reranking。如果 reward model 连排序都排不好,就不应该直接拿它做 RL。
视频生成:同一个问题,多了一条时间轴
视频生成可以看成图像生成的扩展,但不能简单理解为“多生成几张图”。视频多了一条时间轴,所以 reward 也要多一层。Emu Video 这类工作把图像条件和视频生成拆开建模[9];后续视频对齐工作则开始探索用 reward gradient 或 MLLM feedback 来优化视频生成结果[8:1][10]。
一段视频要同时满足三件事:
- 每一帧都要清晰、自然、符合 prompt。
- 相邻帧之间要连贯,主体不能突然变化。
- 整段视频要表达 prompt 中的事件顺序。
因此,视频 reward 常常写成下面这种分层形式。它不是某篇论文的固定公式,而是把单帧质量、时序一致性和整体事件对齐这三类常见评估信号抽象到同一个 reward 里:
这三个分量分别对应:
| 分量 | 检查什么 |
|---|---|
| $R_{\text{frame}}$ | 单帧质量和单帧文本对齐 |
| $R_{\text{temporal}}$ | 帧间一致性和运动自然性 |
| $R_{\text{overall}}$ | 整段视频是否完成 prompt 的事件 |
视频 RL 的困难也随之增加:
| 挑战 | 为什么更难 | 常见缓解思路 |
|---|---|---|
| 时序一致性 | 单帧都好,不代表连起来合理 | 光流一致性、轨迹一致性、视频 VLM 评估 |
| 长 horizon | 视频 token 和 latent 数远超图像 | 分段优化、短片段 reward shaping |
| 计算成本 | 每次采样和打分都更贵 | latent 空间训练、低帧率评估、候选重排 |
| 文本-视频对齐 | prompt 可能包含先后顺序 | 分段 caption、事件级 reward |
直觉上,图像生成的错误常常是“某个地方画错了”;视频生成的错误常常是“前后关系断了”。这就是为什么视频 reward 更依赖片段级和整体级评估。
On-Policy 蒸馏:把 RL 得到的能力固化下来
RL 微调后的模型可能更符合偏好,但它也可能更慢、更贵,或者只适合某个特定采样设置。On-policy 蒸馏的目标,是把 RL 后模型在当前分布上产生的高质量样本,重新变成更便宜的监督学习信号。
可以把它理解成三步:
- 用 RL 后的 teacher 模型在线生成样本。
- 用 reward model 或规则过滤留下高质量样本。
- 让 student 模型学习这些样本,用更低成本复现 teacher 的行为。
这和第 8 章的蒸馏思想一致:强模型负责探索和筛选,弱模型负责把能力压缩成更便宜的推理路径。区别在于,视觉生成蒸馏通常发生在 latent、去噪轨迹或视频 token 空间里,而不是普通文本 token 空间里。
与前面章节的联系
视觉生成 RL 看起来和 VLM 问答离得很远,但它复用了本书前面几条主线。
| 前面章节 | 在视觉生成 RL 中的对应 |
|---|---|
| 第 5 章 REINFORCE | DDPO 把去噪链路当成策略轨迹,用终局 reward 更新每一步采样 |
| 第 7 章 Reward Hacking | 生成模型可能讨好 reward model,却牺牲真实用户意图 |
| 第 9 章 RLVR | 细粒度属性、数量、关系可以变成局部可验证信号 |
| 第 10 章 Agentic RL | 长 horizon 信用分配、多组件 reward 和 KL 约束都再次出现 |
| 第 11.1-11.3 节 VLM RL | VLM 可以反过来做生成模型的 judge、captioner 和 reward model |
最后这一点尤其重要。理解模型和生成模型不是两条完全分开的线。VLM 学会看图以后,可以检查生成图是否符合 prompt;生成模型可以合成更丰富的数据,反过来训练 VLM。到了多模态后训练阶段,“看”和“生成”会越来越像一个闭环。
小结
视觉生成 RL 的目标不是简单地让模型“画得更漂亮”,而是把用户意图拆成可学习的反馈信号,让生成模型在偏好、规则和多模态评估下持续改进。
本节最重要的结论有四个:
- Diffusion 可以被看成 MDP:去噪轨迹就是 episode,最终图像得到 reward,策略梯度把 reward 分配回每一步。
- DDPO 的核心是翻译问题:把去噪概率看成 policy,把最终图像分数看成 reward,就能使用策略梯度。
- Reward model 是生成 RL 的瓶颈:人类偏好、文本对齐和视觉质量都重要,但必须防止 reward hacking。
- 训练和推理都可以用 reward:reranking 更安全,RL fine-tuning 更能固化能力,视频生成则进一步放大了时序和计算问题。
到这里,我们覆盖了 VLM 的理解和生成两个方向的 RL 训练。下一章,我们将进入更广阔的前沿趋势:具身智能、自博弈与离线 RL。
参考资料
Black, K., Janner, M., Du, Y., et al. (2024). Training Diffusion Models with Reinforcement Learning. ICLR. https://arxiv.org/abs/2305.13301 ↩︎ ↩︎ ↩︎ ↩︎ ↩︎ ↩︎ ↩︎ ↩︎ ↩︎ ↩︎ ↩︎
Williams, R. J. (1992). Simple statistical gradient-following algorithms for connectionist reinforcement learning. Machine Learning. https://doi.org/10.1007/BF00992696 ↩︎ ↩︎ ↩︎
Schulman, J. et al. (2017). Proximal Policy Optimization Algorithms. https://arxiv.org/abs/1707.06347 ↩︎ ↩︎ ↩︎ ↩︎ ↩︎
Fan, Y., Watkins, O., Du, Y., et al. (2023). DPOK: Reinforcement Learning for Fine-tuning Text-to-Image Diffusion Models. NeurIPS. https://arxiv.org/abs/2305.16381 ↩︎ ↩︎ ↩︎ ↩︎ ↩︎
Kirstain, S. et al. (2023). Pick-a-Pic: Open Dataset of Human Preferences for Text-to-Image Generation. NeurIPS. https://arxiv.org/abs/2305.01569 ↩︎ ↩︎ ↩︎ ↩︎
Wu, X. et al. (2023). Human Preference Score v2: A Benchmark for Evaluating Human Preferences of Text-to-Image Synthesis. NeurIPS. https://arxiv.org/abs/2306.09341 ↩︎ ↩︎ ↩︎
Clark, K. et al. (2024). Directly Fine-Tuning Diffusion Models on Differentiable Rewards. ICLR. https://arxiv.org/abs/2309.17400 ↩︎
Prabhudesai, M. et al. (2024). Video Diffusion Alignment via Reward Gradients. https://arxiv.org/abs/2407.08737 ↩︎ ↩︎
Girdhar, R. et al. (2024). Emu Video: Factorizing Text-to-Video Generation by Explicit Image Conditioning. ECCV. https://arxiv.org/abs/2311.10709 ↩︎
Wu, X. et al. (2024). Boosting Text-to-Video Generative Model with MLLMs Feedback. NeurIPS. https://neurips.cc/virtual/2024/poster/96722 ↩︎