12.5 离线强化学习:从历史数据到可靠策略
到目前为止,我们见过的大多数强化学习算法都有一个隐含前提:智能体可以一边学习,一边继续和环境交互。DQN 可以反复玩 Atari,PPO 可以在仿真器里摔倒再重来,GRPO 可以让模型不断生成新答案再用规则打分。
但很多真实场景不是这样。自动驾驶不能靠真实事故探索边界条件,医疗决策不能拿病人做随机试验,工业机器人不能每天撞坏工装夹具,推荐系统也不能长期把高风险策略直接推给真实用户。
这些问题的共同形态是:我们有大量历史数据,却不能在训练时继续试错。 这就是 Offline Reinforcement Learning(Offline RL,离线强化学习) 要解决的问题。

先用人话看一遍
Offline RL 可以用一句话概括:
只给你一堆过去发生过的轨迹,让你学出一个未来要部署的新策略。
它和三件事很像,但又不完全一样:
| 方法 | 数据从哪来 | 训练时能否继续试错 | 学到什么 |
|---|---|---|---|
| Online RL | 当前策略实时采样 | 能 | 通过试错优化策略 |
| Off-policy RL | replay buffer + 新交互 | 能 | 复用旧数据,也继续收集新数据 |
| Imitation Learning / BC | 专家或历史动作 | 不能 | 模仿数据里的动作 |
| Offline RL | 固定历史数据集 | 不能 | 在不越出数据太远的前提下提高回报 |
| Offline-to-Online RL | 先固定数据,后少量在线交互 | 后期能 | 先安全初始化,再真实微调 |
最危险的地方在于:离线数据只覆盖了行为策略曾经做过的动作。模型训练完以后,如果新策略开始选择数据里没见过的动作,我们其实不知道这些动作会怎样。Q 函数却可能因为神经网络外推,错误地给这些动作很高分。
所以离线 RL 的核心不是“怎样更激进地找高 Q 动作”,而是:
怎样从固定数据中学到更好策略,同时不要被数据分布外的幻想动作骗走。
数学问题:固定数据里的策略优化
标准 MDP 仍然是:
在线 RL 想优化的是策略回报:
但 Offline RL 不能从 继续采样。它只有一个固定数据集:
这里的 叫 behavior policy,也就是收集数据时的旧策略。它可能是人类司机、旧推荐系统、专家策略、随机探索策略,也可能是很多策略混在一起。
展开:这几行公式怎么读?
D 是离线数据集。它像一堆录像,每一帧记录了状态 s_t、动作 a_t、奖励 r_t、下一状态 s_{t+1} 和是否结束 d_t。
pi_beta 是“录像是谁拍出来的”。如果数据来自人类司机,pi_beta 就是人类驾驶行为;如果来自老模型,pi_beta 就是老模型策略。
我们真正想部署的是新策略 pi。问题是:训练时不能让 pi 上路继续试,只能用 D 判断它好不好。
如果直接套 Q-learning,会遇到一个很典型的 backup:
这一步在 online RL 里很自然,因为如果某个动作被高估,智能体之后可以真的试一下,再用真实反馈纠正。但在 offline RL 里, 很可能选到数据集中没出现过的动作。这个动作的 Q 值只是神经网络外推出来的,未必可信。
这就是 extrapolation error 或 out-of-distribution action 问题。
展开:为什么 max 会制造分布外动作?
Q 网络要回答的是“任意状态动作对有多好”。但离线数据只告诉它数据中出现过的动作有多好。
当我们写 max_a Q(s, a) 时,优化器会在整个动作空间找最高值。神经网络在未见过动作上的预测可能很随意。如果某个没见过的动作被错误估高,max 会把它挑出来,策略也会朝它移动。
在线 RL 有纠错机会:真的试一试,发现不好就降 Q。离线 RL 没有这个机会,错误会在 bootstrapping 中被反复放大。
用一句工程话说:
Online RL 怕探索太慢;Offline RL 怕模型相信自己没见过的东西。
最小实践:复现 OOD 动作问题
先做一个小到能跑懂的实验。完整脚本在 minimal_offline_rl_contextual_bandit.py。
这个环境不是完整 MDP,而是一个上下文 bandit。它足够小,但能复现离线 RL 最核心的坑:数据只覆盖窄动作区,普通 Q 最大化会跑到数据没覆盖的极端动作。
运行:
python docs/chapter12_future_trends/offline-rl/snippets/minimal_offline_rl_contextual_bandit.py典型输出:
behavior_policy return=-0.0480 support_gap=0.0000
oracle_policy return= 0.0000 support_gap=unknown
naive_q_actor return=-0.1137 support_gap=0.4819
cql_actor return=-0.0420 support_gap=0.0112
td3bc_actor return=-0.0260 support_gap=0.0520这里 support_gap 表示策略动作离数据集行为动作有多远。naive_q_actor 的 gap 很大,说明它被 Q 网络外推吸引到了数据没覆盖的地方,真实回报反而更差。cql_actor 和 td3bc_actor 更保守,动作仍然留在数据附近。
核心代码只有两处。
第一,普通 Q 只在数据动作上拟合奖励:
q_data = q(state, action)
loss = ((q_data - reward) ** 2).mean()第二,CQL 加一个保守项:随机采一些动作,如果 Q 网络给这些动作高分,就惩罚它。
q_random = q(repeated_state, random_action).reshape(batch_size, num_random_actions)
conservative_penalty = torch.logsumexp(q_random, dim=1).mean() - q_data.mean()
loss = mse_loss + alpha * conservative_penalty这不是完整 CQL 论文实现,但已经抓住核心直觉:让数据外动作的 Q 值低一点,策略就不容易被幻觉高分带走。
数据质量:离线 RL 首先是数据问题
离线数据不是越多越好,而是要看它覆盖了什么。
D4RL 论文把离线 RL 数据集分成很多类型[1]。这比只说“专家数据”更接近真实世界:
| 数据类型 | 直觉 | 难点 |
|---|---|---|
| random | 随机策略收集 | 回报低,但覆盖可能广 |
| medium | 中等策略收集 | 有可学信号,也有很多坏动作 |
| expert | 专家策略收集 | 质量高,但覆盖窄 |
| medium-replay | 训练中 replay buffer | 混合了从差到好的策略 |
| mixed / multiway | 多个策略、多段轨迹拼在一起 | 需要把好片段 stitching 起来 |
| narrow demos | 少量示范 | 模仿容易,超过示范很难评估 |
这解释了为什么 behavior cloning 有时很强:如果数据几乎全是专家轨迹,模仿就够了。也解释了为什么 Offline RL 有时比模仿更有价值:如果数据里混有许多次优轨迹,算法需要识别哪些动作更好,而不是平均模仿所有动作。
方法地图:离线 RL 的几条路线
离线 RL 方法很多,但可以按“怎样避免分布外动作”来理解。
| 路线 | 代表方法 | 核心做法 |
|---|---|---|
| 行为约束 | BCQ[2], BEAR[3], TD3+BC[4], AWAC[5] | 新策略不要离数据行为太远 |
| 保守价值估计 | CQL | 主动压低数据外动作的 Q 值 |
| 隐式价值学习 | IQL | 不对数据外动作做 max |
| 序列建模 | Decision Transformer | 不学 Q,直接条件生成动作 |
| 模型辅助与规划 | MOPO[6], MOReL[7], COMBO[8] | 学模型,但惩罚模型不确定区域 |
| Offline-to-Online | AWAC, IQL fine-tuning | 先离线安全初始化,再少量在线微调 |
| LLM 偏好离线优化 | DPO 等 | 用固定偏好数据更新语言模型策略 |
这篇文章重点讲 CQL、IQL 和 Decision Transformer,因为它们分别代表三种很清晰的思想:保守 Q、避开 OOD max、把 RL 当序列建模。

CQL:把数据外动作压低
CQL(Conservative Q-Learning)直接面对 Q 高估问题[9]。
标准 Bellman error 是:
CQL 在上面加一个保守项。离散动作空间里,一个常见写法是:
前一项会惩罚所有动作里偏高的 Q,后一项把数据中真实出现过的动作保留下来。直觉上,CQL 让 Q 函数变得悲观:宁可低估没见过的动作,也不要把策略引到危险盲区。
展开:CQL 公式怎么慢慢读?
logsumexp 可以理解成一个平滑版的 max。如果某些动作 Q 值很高,这一项就会变大。
E_D Q(s,a) 只看数据集中真的出现过的动作。CQL 用它抵消一部分惩罚,让数据内动作不被全部压低。
alpha 控制保守程度。太小,压不住 OOD 高估;太大,策略会过度模仿数据,学不到改进。
代码上,CQL 的味道就是:
q_data = q(state, data_action)
q_random = q(state_repeated, random_action).view(batch_size, num_random_actions)
td_loss = ((q_data - bellman_target) ** 2).mean()
cql_penalty = torch.logsumexp(q_random, dim=1).mean() - q_data.mean()
loss = td_loss + alpha * cql_penaltyIQL:不在数据外动作上取 max
IQL(Implicit Q-Learning)的路线更克制:它不显式约束策略,也不在动作空间上做 ,而是只用数据集动作学习 value 和 Q[10]。
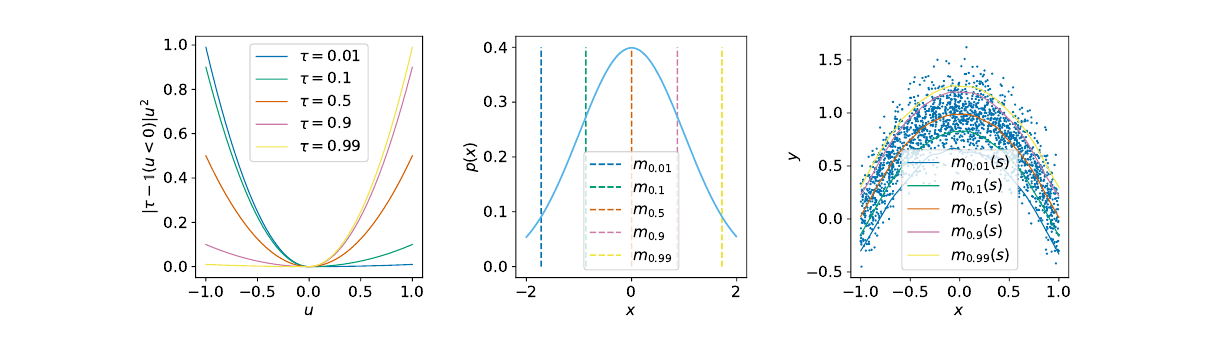
它的核心是 expectile regression。先学习一个 value 函数:
其中非对称平方损失是:
当 时, 会更靠近数据动作里的高 Q 部分。它像是在问:在数据集中出现过的动作里,较好的那一批大概有多好?
然后 Q 函数用这个 value 做 target:
最后策略不是直接最大化 Q,而是做 advantage-weighted behavior cloning:
其中:
也就是说:数据里比平均更好的动作,多模仿一点;数据里不好的动作,少模仿一点。整个过程仍然不需要问“数据外某个动作 Q 有多高”。
展开:IQL 为什么稳定?
IQL 的关键是它把“找最优动作”变成了“从数据动作里挑更好的动作”。
普通 Q-learning 会在 next_state 上对所有动作取 max,容易选到 OOD 动作。IQL 的 value target 来自数据动作的 expectile,不需要显式搜索动作空间。
所以 IQL 在连续动作离线控制里很受欢迎:公式看起来绕,但实现上相当干净,调参也通常比 CQL 轻一些。
最小化版代码长这样:
diff = q_target(state, data_action) - value(state)
weight = torch.where(diff > 0, tau, 1.0 - tau)
value_loss = (weight * diff.pow(2)).mean()
q_target_value = reward + gamma * next_value
q_loss = (q(state, data_action) - q_target_value).pow(2).mean()
advantage = q(state, data_action) - value(state)
actor_weight = torch.exp(beta * advantage).clamp(max=100.0)
actor_loss = -(actor_weight * policy.log_prob(data_action, state)).mean()Decision Transformer:把轨迹当序列
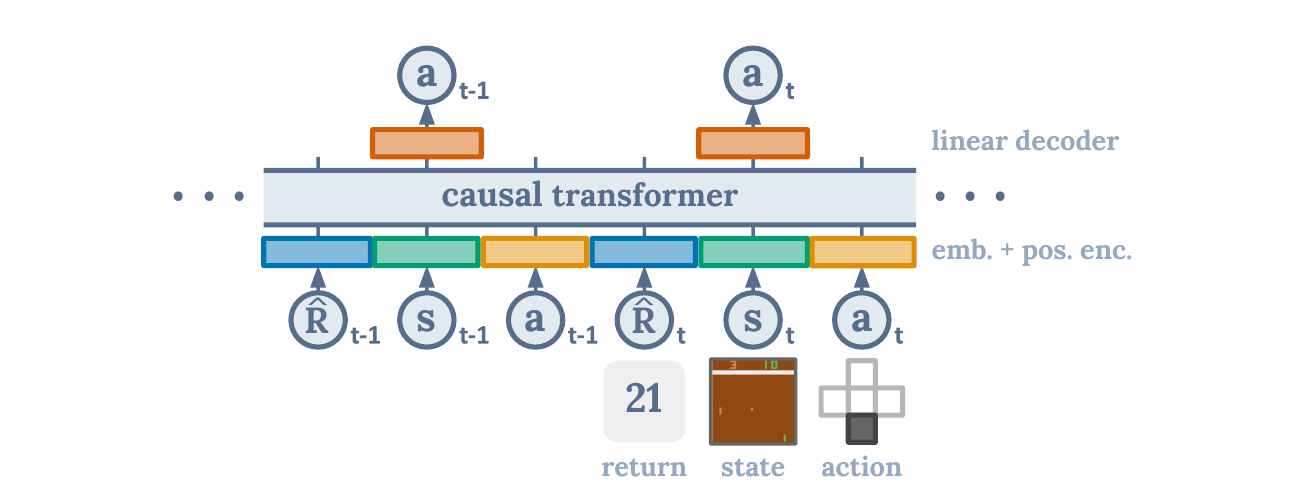
Decision Transformer(DT)走了第三条路线:不学 Q 函数,也不写 Bellman backup,而是把强化学习变成条件序列建模[11]。
一条轨迹可以写成:
其中 是 return-to-go:
训练时,Transformer 学习:
推理时,你给它一个目标回报,比如“我想拿 360 分”,它就根据过去状态和动作生成下一步动作。
直觉上,DT 像一个条件模仿学习模型:
- 如果你给普通 BC 一个状态,它模仿数据里的平均动作。
- 如果你给 DT 一个状态和“高回报目标”,它会模仿数据中那些通向高回报的轨迹片段。
这让 DT 特别适合长序列、多任务、稀疏奖励或已经拥有大模型序列建模基础设施的场景。但它也有边界:如果数据里根本没有高回报轨迹,光把 target return 设很高不会凭空创造能力。
三种代表方法怎么选?
| 方法 | 最适合的直觉场景 | 优点 | 风险 |
|---|---|---|---|
| CQL | Q 值外推风险大,需要保守安全 | 原理直接,悲观性强 | α 难调,过保守会学不动 |
| IQL | 连续控制、数据质量混合 | 稳定、实现简洁、适合微调 | 依赖数据里存在可加权的好动作 |
| TD3+BC | 想要强 baseline | 简单有效,工程成本低 | 本质仍偏行为约束 |
| AWAC | 离线预训练后继续在线提升 | offline-to-online 很自然 | 在线阶段仍要处理安全探索 |
| Decision Transformer | 长序列、多任务、轨迹可 token 化 | 复用 Transformer 工具链 | 对 return conditioning 敏感 |
| BC | 专家数据很干净、部署风险要最低 | 简单、稳定 | 很难超过数据策略 |
一个实际建议:如果只是想做可靠 baseline,先跑 BC、TD3+BC、IQL;如果任务对安全更敏感,再看 CQL;如果你的数据天然是长序列、任务目标多样,DT 值得尝试。
与 DPO 和 LLM 后训练的关系
第 9 章的 DPO 也使用固定数据集,不需要在线生成新回答,因此可以从广义上看成一种离线策略优化[12]。不过它和传统 Offline RL 仍有重要差别。
传统 Offline RL 的数据通常是:
DPO 的数据是偏好对:
其中 是更受偏好的回答, 是较差回答。DPO 不显式学习 Q 函数,而是用 Bradley-Terry 偏好模型推导出一个分类式目标:
这里的 reference model 有点像“不要离数据策略太远”的约束。它不是 CQL,但有类似的安全味道:不要为了偏好优化把模型推到训练分布外太远。
所以可以这样理解:
- CQL/IQL 主要处理连续控制里的离线转移数据。
- DT 把离线轨迹变成序列建模。
- DPO 把离线偏好数据变成语言模型策略优化。
- 它们共同面对的问题都是:没有在线纠错时,策略更新要保守、有约束、可评估。
评估:不能在线试错时怎么知道策略好不好?
离线 RL 的评估很棘手。训练时不能交互,不代表研究时完全不能评估;大多数 benchmark 仍然会在隐藏环境里评估策略。但真实部署前,往往只能做离线评估。
常见做法有四类:
- 行为克隆基线:先问 Offline RL 是否真的超过 BC。
- FQE / OPE:用固定数据估计新策略价值,但对覆盖度敏感。
- 支持度诊断:测新策略动作离数据动作有多远。
- 保守部署:先 shadow mode,再小流量,再 offline-to-online 微调。
一个很实用的检查是:不要只看 estimated Q,要看 policy action 与数据动作的距离。如果策略大量选择数据里没出现过的动作,即使离线指标很好,也应该高度警惕。
常见问题 QA
Q1:Offline RL 和模仿学习有什么区别?
模仿学习只问:“数据里的人或旧策略在这个状态下做了什么?”
Offline RL 还要问:“数据里哪些动作带来了更高长期回报?”
如果数据全是专家演示,BC 可能已经非常强。但如果数据来自很多水平不同的策略,BC 会把好动作和坏动作一起平均;Offline RL 则试图从回报中挑出更好的动作。
Q2:离线数据很差,还能学出好策略吗?
要看“差”是什么意思。
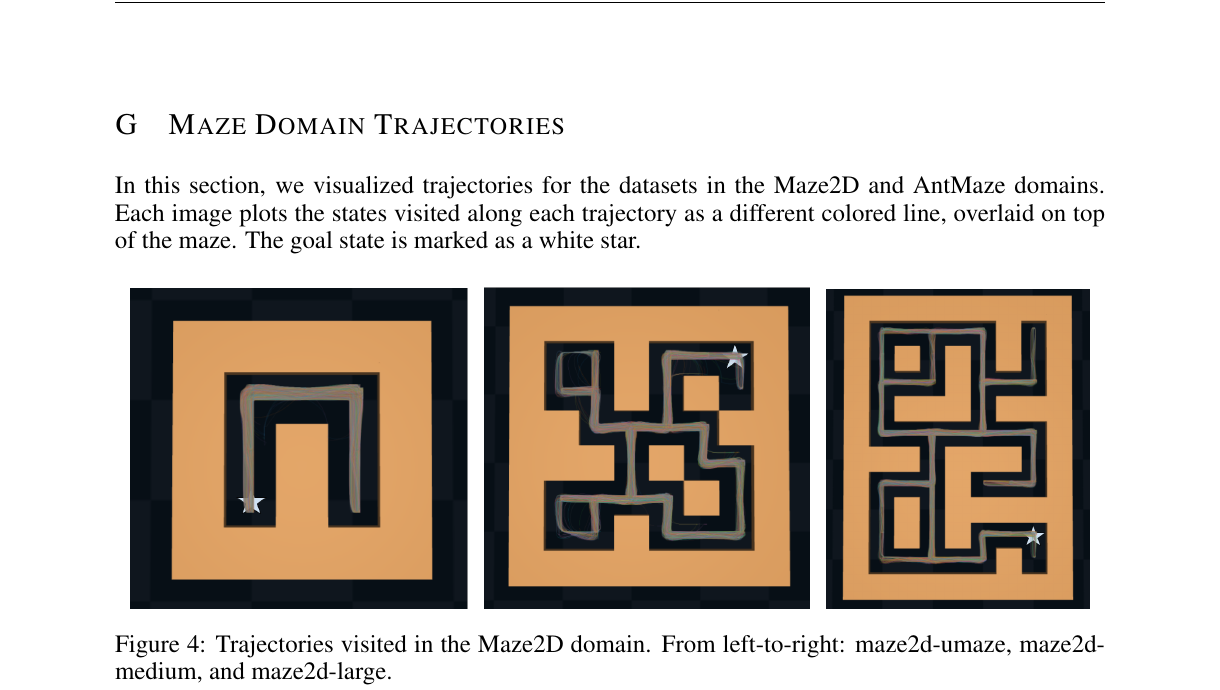
如果数据回报低但覆盖广,算法可能从许多片段中 stitching 出更好的策略。D4RL 里的 Maze2D / AntMaze 就体现了这种思想:轨迹片段不一定单条都到达目标,但组合起来可能能走通[1:1]。
如果数据既差又窄,比如从未接近成功状态,也没有探索关键动作,那 Offline RL 很难凭空创造能力。它不是魔法,不能替代数据覆盖。
Q3:为什么普通 Q-learning 在离线环境里容易崩?
因为 Bellman backup 里的 max_a Q(s, a) 会主动寻找高 Q 动作,而 Q 网络在数据外动作上的估计没有真实反馈约束。
在线 RL 中,错误高估会被新采样纠正;离线 RL 中,错误高估会被 target 反复使用,甚至让策略越走越远。
CQL 的思路是把数据外 Q 压低,IQL 的思路是干脆不对数据外动作取 max。
Q4:CQL、IQL、TD3+BC 应该先学哪个?
实践上建议:
- 先做 BC,知道“纯模仿”能到什么水平。
- 再做 TD3+BC,理解行为约束为什么有效。
- 再做 IQL,它是很好的现代 offline RL baseline。
- 最后看 CQL,理解保守价值估计的数学思想。
如果只是为了工程落地,IQL 和 TD3+BC 往往是更舒服的起点。
Q5:Decision Transformer 是不是比 CQL/IQL 更先进?
不是简单的“更先进”。它换了问题表述。
CQL/IQL 仍然是 value-based / actor-critic 思路,适合连续控制和传统 RL benchmark。Decision Transformer 把轨迹变成 token 序列,适合长上下文、多任务、条件生成,尤其适合和 Transformer 工具链结合。
但 DT 依赖数据中存在足够好的轨迹。如果数据里没有高回报行为,把 target return 设很高也不一定有用。
Q6:Offline-to-Online 为什么重要?
纯离线训练适合安全初始化,但真实世界最终会遇到数据没覆盖的新情况。Offline-to-Online 的思路是:先用离线数据学到不太差、不太危险的初始策略,再用少量在线交互继续提升。
AWAC 这类方法就是为了让离线预训练和在线微调自然衔接[5:1]。机器人和工业系统里,这通常比从零在线探索更现实。
Q7:Offline RL 能不能直接用于自动驾驶和医疗?
不能“直接”。这类高风险场景还需要因果推断、反事实评估、置信区间、安全约束、人工审核和渐进部署。
Offline RL 提供的是一种从历史数据中学习决策策略的框架,但不是部署许可。越高风险,越要把它当成“候选策略生成器”,而不是自动上线系统。
Q8:DPO 是不是 Offline RL?
从广义上说,是一种离线策略优化:它只用固定偏好数据,不需要在线采样。
但从传统 RL 角度说,DPO 不是 CQL/IQL 那种学习 的离线 RL。它没有显式环境转移,也不做 Bellman backup。它更像是“带 reference model 约束的偏好监督学习”。
共同点是:都在固定数据上更新策略,都要防止策略跑出数据分布太远。
与前面章节的联系
| 前面章节的概念 | 在离线 RL 中的对应 |
|---|---|
| DQN 经验回放(第 4 章) | 离线 RL 的数据集 = "一个不再增长的 replay buffer" |
| PPO 的 KL 约束(第 7 章) | 离线 RL 的行为约束(BCQ/TD3+BC)本质也是"不要离旧策略太远" |
| DPO 的 reference model(第 9 章) | reference model 扮演了和 BCQ/TD3+BC 中行为约束相同的角色 |
| GRPO 的组内 advantage(第 9 章) | IQL 的 advantage-weighted BC 与 GRPO 的 advantage 计算异曲同工 |
| RLVR 的规则验证(第 9 章) | 离线 RL 的 reward 信号只能来自已有数据,不能在线验证 |
| 自博弈的对手池(12.3 节) | 离线 RL 的数据集 = 历史策略产生的轨迹,和对手池中的旧策略数据同源 |
最深刻的联系可能是:DPO 就是 LLM 版本的离线 RL。DPO 用固定偏好数据集优化语言模型策略,不需要在线采样。它的 reference model 扮演了和 BCQ/TD3+BC 中行为约束相同的角色——防止策略跑出训练分布。而 IQL 的 advantage-weighted behavior cloning 则和第 9 章的 GRPO 异曲同工:都是在已有数据中"挑出比平均更好的动作"来优化策略,只是 GRPO 的数据来自当前策略的在线采样,IQL 的数据来自固定的历史轨迹。
从这个角度看,本书的 RL 内容形成了一条清晰的谱系:完全在线(PPO)→ 半在线(GRPO/Iterative DPO)→ 完全离线(CQL/IQL/DPO)。越靠近离线端,策略更新越安全、越保守,但也越受限于数据质量。越靠近在线端,探索能力越强,但也越需要工程投入和安全保障。
小结
Offline RL 的核心问题不是“没有环境怎么办”这么简单,而是:当你不能在线纠错时,怎样避免策略被数据外的错误估计带偏。
CQL 选择悲观:压低没见过动作的 Q。IQL 选择绕开:只从数据动作里学习高价值部分。Decision Transformer 选择重写问题:把轨迹当成条件序列来建模。TD3+BC、AWAC 这类方法则提醒我们,很多时候简单的行为约束就是强 baseline。
下一步可以把 Offline RL 和前面的 DPO、GRPO 联系起来看:现代 RL 越来越像一个连续谱,一端是固定数据上的保守优化,另一端是在线生成和验证,中间是离线预训练、偏好学习、世界模型和少量在线微调。
参考文献:
Fu, J. et al. (2020). D4RL: Datasets for Deep Data-Driven Reinforcement Learning. https://arxiv.org/abs/2004.07219 ↩︎ ↩︎
Fujimoto, S. et al. (2019). Off-Policy Deep Reinforcement Learning without Exploration. ICML. https://arxiv.org/abs/1812.02900 ↩︎
Kumar, A. et al. (2019). Stabilizing Off-Policy Q-Learning via Bootstrapping Error Reduction. NeurIPS. https://arxiv.org/abs/1906.00949 ↩︎
Fujimoto, S. and Gu, S. S. (2021). A Minimalist Approach to Offline Reinforcement Learning. NeurIPS. https://arxiv.org/abs/2106.06860 ↩︎
Nair, A. et al. (2020). Accelerating Online Reinforcement Learning with Offline Datasets. https://arxiv.org/abs/2006.09359 ↩︎ ↩︎
Yu, T. et al. (2020). MOPO: Model-based Offline Policy Optimization. NeurIPS. https://arxiv.org/abs/2005.13239 ↩︎
Kidambi, R. et al. (2020). MOReL: Model-Based Offline Reinforcement Learning. NeurIPS. https://arxiv.org/abs/2005.05951 ↩︎
Yu, T. et al. (2021). COMBO: Conservative Offline Model-Based Policy Optimization. NeurIPS. https://arxiv.org/abs/2102.08363 ↩︎
Kumar, A. et al. (2020). Conservative Q-Learning for Offline Reinforcement Learning. NeurIPS. https://arxiv.org/abs/2006.04779 ↩︎
Kostrikov, I. et al. (2022). Offline Reinforcement Learning with Implicit Q-Learning. ICLR. https://arxiv.org/abs/2110.06169 ↩︎
Chen, L. et al. (2021). Decision Transformer: Reinforcement Learning via Sequence Modeling. NeurIPS. https://arxiv.org/abs/2106.01345 ↩︎
Rafailov, R. et al. (2023). Direct Preference Optimization: Your Language Model is Secretly a Reward Model. NeurIPS. https://arxiv.org/abs/2305.18290 ↩︎