4.1 DQN 的必要性:Q 表格的局限与神经网络的替代
本节导读
核心内容
- 回顾 Q-Learning 如何用 TD 目标修正一张动作价值表。
- 理解 Q 表为什么依赖“状态可以枚举”这个前提。
- 说明 DQN 为什么要用神经网络表示 ,以及直接替换表格后会遇到哪些稳定性问题。
核心公式
Q-Learning 更新规则 (Q-Learning Update Rule):
- :表中当前状态-动作对的旧估计。
- :这次经验构造出的 TD 目标,由即时奖励和下一状态的最优动作价值组成。
- :学习率,决定旧估计向 TD 目标移动多少。
TD Target (时序差分目标):
- :这一步真实观察到的即时奖励。
- :从下一状态 出发,按当前表格估计的最优未来价值。
- 两部分相加,给出这次更新中 应该靠近的目标值。
TD Error (时序差分误差):
- :旧估计低于目标,需要上调。
- :旧估计高于目标,需要下调。
- :旧估计已经与这次目标一致。
Q-Learning 回顾
第 3 章已经介绍过动作价值函数 和 Q-Learning。现在我们把注意力放回它的实现形式:在表格版本中,算法为每个状态-动作对保存一个当前估计,并用每一步经验逐步修正这张表。
把第 3.5 节的更新规则重新写出来:
这行公式可以读成“用一次新经验修正表中一个旧数字”。先构造这次更新的目标:
它由两部分组成:这一步真实拿到的奖励 ,以及下一状态 中当前看起来最好的未来价值。再用这个目标减去表格里的旧估计:
这个差值就是 TD Error。最后,算法不是直接覆盖旧值,而是让 按学习率 向目标移动一小步。这样写的好处是,更新既能利用最新经验,又不会被某一次随机结果完全带走。
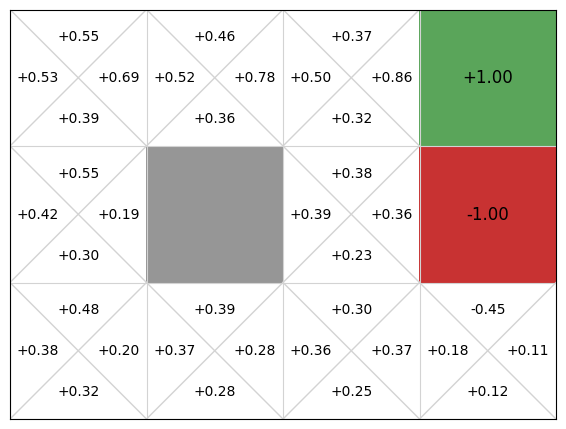
初始时整张表可以全是 0。智能体每走一步,只更新表中的一个状态-动作格子。随着交互次数增加,靠近终点的动作先得到更准确的估计;这些估计又通过 TD 目标中的 向前传播。最后,策略并不是被手工写出来的,而是从这张表中逐渐显现出来的:在每个状态选择 Q 值最大的动作。
这个过程之所以可行,依赖一个前提:表格必须装得下所有状态-动作对。 每一步更新都要读 ,还要在下一状态中比较所有 。在这种小型 GridWorld 中,这只是几十个数字;但如果状态不再能枚举,问题就变了。
表格的边界
Q 表既是 Q-Learning 的记忆,也是它的限制。只要所有状态-动作对都能列出来,查表、更新、取最大值都很直接。一旦状态无法列成有限行,“为每一格单独存一个数”的实现方式就不再成立。
我们先看离散状态的情况。猜硬币只有 2 个状态,Q 表 4 行。井字棋约 个局面,勉强还能建表。国际象棋约有 种合法局面——已经超过了地球上所有计算机的存储总和。围棋约 种局面,而可观测宇宙中的原子总数也不过 个。
这些例子虽然巨大,但至少仍然是离散状态:理论上每个局面都可以命名。真正的分水岭出现在连续状态。
LunarLander 的状态是 8 维向量,包括位置、速度、角度、角速度和两条支架是否接触地面。其中前 6 个维度是连续实数。只要其中一个维度可以在某个区间内取任意实数,例如 ,那么这个维度本身就已经包含无穷多个可能取值;6 个连续维度组合在一起,状态集合当然也是无穷的。
实际实现中,我们也可以强行离散化。比如把这 6 个连续维度各切成 50 个格子,状态总数就是 ;再乘上 4 个动作,就是数百亿个状态-动作格子。这还只是一个低维控制任务。
Atari 游戏更明显。标准预处理后的输入是 4 帧堆叠的 灰度图,共 28224 个像素值,每个像素 256 种取值。可能的状态数为 。这个数字的意义不在于精确计数,而在于说明:像素输入已经不可能被当成一张可枚举的状态表来处理。
这就是强化学习中的维度灾难(curse of dimensionality)。需要特别区分的是:Q-Learning 的 TD 思想没有因此失效,失效的是“用表格逐格存储 ”这个表示方式。状态空间越大,表格方法越难利用相似状态之间的关系;连续状态和像素状态则直接让建表这件事失去意义。
接下来要做的,不是放弃 Q-Learning,而是换一种表示 的方法。
函数逼近
上一节我们已经看到,表格方法卡住的地方不在 TD 更新本身,而在“Q 值必须按状态逐行存储”这个实现前提。现在要解决的问题可以说得更具体一些:如果状态无法枚举,算法还怎样保存和更新动作价值?
这正是函数逼近(function approximation)要处理的事情。它不是改变 Q-Learning 的目标,而是改变动作价值的表示方式:不再为每个状态-动作对单独存一个数字,而是用一个带参数的函数,在给定状态和动作时输出对应的价值估计。
先把第 3.4 节的“价值表”思想推广一步。状态价值表给每个状态存一个 ;Q 表则给每个状态下的每个动作都存一个 。因此,在一个离散、可枚举的小环境中,Q-Learning 维护的是一张“状态 × 动作”的表:
| 状态 | 不喷 | 左喷 | 主发动机 | 右喷 |
|---|---|---|---|---|
| $s_1$ | 0.10 | 0.05 | 0.40 | 0.00 |
| $s_2$ | -0.20 | 0.15 | 0.30 | 0.10 |
| $s_3$ | 0.00 | -0.10 | 0.20 | 0.05 |
这张表的读法与前面几节完全一致。状态 对应第二行,这一行就是当前状态下所有动作的价值估计:
如果用贪心策略选动作,就比较这一行里的四个数,选择最大值对应的动作。之后,智能体执行动作并得到一条转移 ,Q-Learning 根据 TD 误差更新表中对应的格子 。在表格表示中,每个状态-动作对都有独立位置,所以这一步更新不会直接改动其他格子。
真正的问题在于,这种表示依赖一个强前提:状态必须能被写成表中的某一行。LunarLander 的状态是 8 个连续数,Atari 的状态是像素帧,它们都不是可以提前列完的行号。此时,问题不再是“这一行里的数怎么更新”,而是“这一行本身从哪里来”。
函数逼近给出的回答是:不要显式保存所有行,而是学习一个函数来生成这些行。写成符号,就是用参数 表示一个近似的动作价值函数:
这行公式可以按下面的方式读:
| 符号 | 含义 |
|---|---|
| $s$ | 当前状态,例如 LunarLander 的 8 维状态向量。 |
| $a_i$ | 第 个可选动作。 |
| $\theta$ | 函数的参数,在 DQN 中就是神经网络参数。 |
| $Q(s,a_i;\theta)$ | 在参数 下,对状态 执行动作 的价值估计。 |
| $Q(s,\cdot;\theta)$ | 一次输入状态 后,得到所有动作的 Q 值向量。 |
这一步的含义是:原来 Q 表中需要查出的“一行”,现在由函数即时计算出来。对于 LunarLander,输入可以是
塞进网络,得到 4 个动作的价值估计:
因此,函数逼近替换的不是 Q-Learning 的贝尔曼目标,而是 Q 值的存储方式。表格方法存的是 个独立数字;函数逼近存的是一组共享参数 。参数共享带来一个重要效果:在某个状态附近学到的价值结构,会影响到相似状态的预测。这就是函数逼近的泛化能力,也是 DQN 能从连续状态和像素输入中学习的基础。
用函数逼近来做强化学习并不是新想法。Sutton 在 1988 年的 TD() 论文中已经讨论了用神经网络作为函数逼近器 [1]。1990 年代,Lin [2] 和 Rummery & Niranjan [3] 先后尝试把神经网络和 Q-Learning 结合。但这些早期尝试只能在极小的问题上工作——受限于当时的计算能力、训练稳定性,以及缺乏像 Atari 这样统一且可以大量快速交互的基准环境,它们始终未能证明自己。
真正的突破要等到 2013 年。DeepMind 的 Mnih 等人将函数逼近的思想直接搬到 Q-Learning 上,用神经网络近似 :
这就是深度 Q 网络(Deep Q-Network, DQN),名字里的 “Deep” 指的是深度神经网络 [4]。
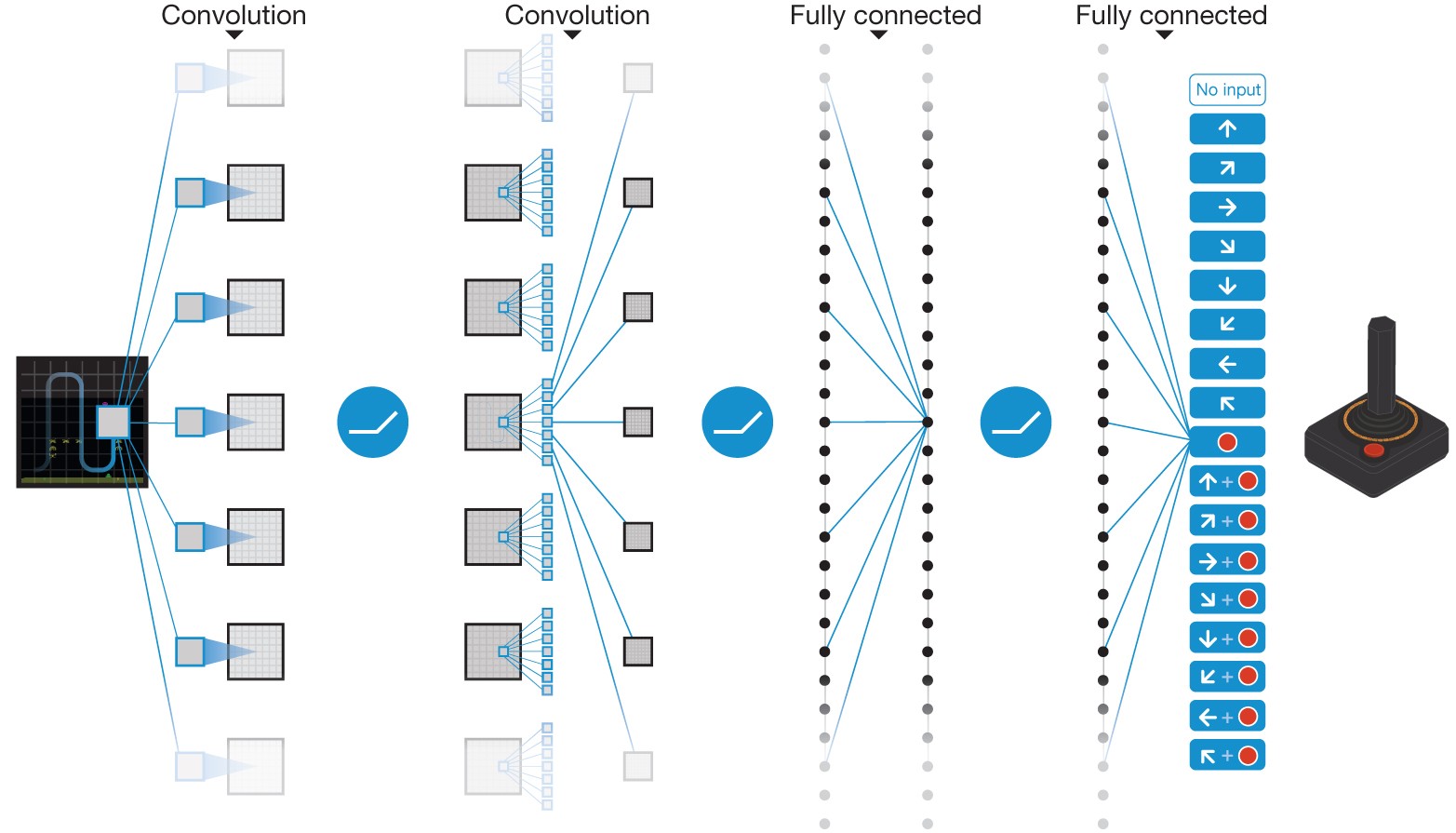
DQN 的架构因此也很直接:网络接收状态 作为输入,同时输出所有可能动作的 Q 值——一个输入,多个输出。在 LunarLander 中,输入是 8 维向量,输出是 4 个 Q 值;在 Atari 中,输入是 的像素帧,输出维度等于游戏的动作数。

归结起来,DQN 的第一步是:保留 Q-Learning 的更新思想,但把“按状态逐行存储的 Q 表”换成“共享参数的函数 ”。 2015 年,这篇论文正式发表在 Nature 上,标志着深度强化学习时代的开端 [5]。
直接替换为什么仍然会崩溃
到这里,我们只解决了“表格装不下”的问题。下一步很自然:既然神经网络可以输出 ,那能不能把 Q-Learning 公式里的表格值全部换成网络输出,然后直接训练?
这个想法是 DQN 的起点,但还不是完整答案。直接替换会暴露两个训练问题:样本高度相关,目标也会跟着网络一起移动。
先看样本相关。在 Atari 游戏中,相邻帧通常非常相似。以 Pong 为例,标准预处理后的画面是 个像素,相邻两帧可能只差球或球拍移动的一小块区域。如果按时间顺序把最近几十帧直接组成一个 batch,模型看到的并不是几十个独立场景,而是同一个场景的连续微小变化。
这会削弱随机梯度下降的效果。一个 batch 名义上有很多样本,但如果它们来自同一段连续轨迹,梯度方向就会被最近经历主导。于是网络很容易围着当前局面调整参数,而不是学习对更广泛状态都有效的价值估计。这个问题指向 DQN 的第一个稳定化组件:训练数据不能只来自最近几步,而要从更大的经验集合中随机取样。
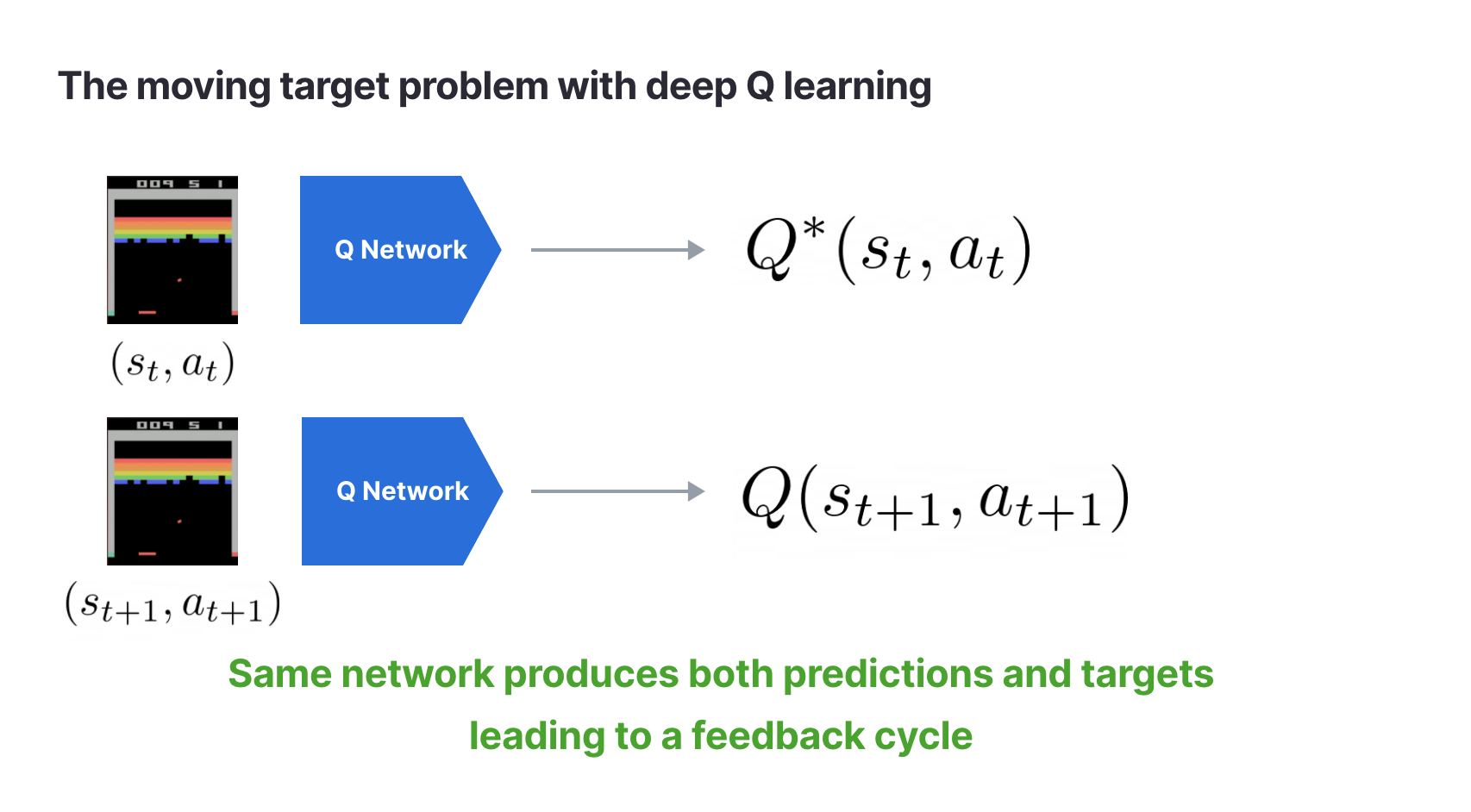
再看目标移动。Q-Learning 的 TD 目标是
在表格方法中,更新 通常只改一个格子。但在神经网络中,所有 Q 值都由同一组参数 计算。一次梯度更新不只会改变 ,也可能改变 。也就是说,网络一边学习当前预测,一边改变下一次要追的目标。
看一个极简例子。假设只有 2 个状态和 2 个动作,。当前网络输出为:
现在来了一条经验 ,TD 目标为:
这次更新会把 往 8.92 的方向推。问题在于,参数更新后,其他输出也可能一起变化。假设更新后网络变成:
注意 :它原本是 8.0,现在变成 6.3。下一次再用 计算 TD 目标时,目标中的未来价值就已经变了。表格方法里,改 不会直接改 ;神经网络中,参数共享使这种连带变化成为常态。
因此,直接把神经网络套到 Q-Learning 上,至少会遇到两个不稳定来源:训练样本来自连续轨迹,容易相关;TD 目标又依赖正在变化的网络,容易移动。DQN 真正要解决的,不只是“用网络代替表格”,还包括让这个替代后的训练过程稳定下来。
这也是 DeepMind DQN 的关键贡献。他们并不是第一次想到用神经网络近似 Q 函数;关键在于把问题拆成三个组件:用 Q 网络替代表格,用经验回放打散样本相关性,用目标网络减缓 TD 目标移动。换句话说,本节解释了“为什么需要 DQN”,下一节要拆开看“DQN 怎样组织这些组件”。
思考题:1990 年代就有人尝试神经网络 Q-Learning,为什么直到 2013 年才成功?
至少有三个原因。第一,算力条件不同:1990 年代很难在像素级输入上训练深度网络。第二,训练稳定化技术还不成熟:没有经验回放和目标网络,神经网络版 Q-Learning 很容易发散。第三,基准环境不同:Atari 模拟器(Arcade Learning Environment)提供了统一、可重复、可大量交互的评测任务,使这类方法终于能被系统检验。
接下来,我们逐项拆解 DQN 的三个核心组件:Q 网络、经验回放和目标网络。
参考文献
Sutton, R. S. (1988). Learning to predict by the methods of temporal differences. Machine Learning, 3(1), 9-44. ↩︎
Lin, L.-J. (1993). Reinforcement learning for robots using neural networks. PhD thesis, Carnegie Mellon University. ↩︎
Rummery, G. A., & Niranjan, M. (1994). On-line Q-learning using connectionist systems. Technical Report CUED/F-INFENG/TR 166, Cambridge University. ↩︎
Mnih, V., et al. (2013). Playing Atari with deep reinforcement learning. arXiv preprint, arXiv:1312.5602. ↩︎
Mnih, V., et al. (2015). Human-level control through deep reinforcement learning. Nature, 518(7540), 529-533. ↩︎