7.6 传统强化学习在长程任务中的探索
前面我们用 PPO 解决了 BipedalWalker,并整理了不少游戏项目入口。这些任务的决策步数通常在几十到几千步之间,奖励信号也相对容易设计。但现实中的很多任务远比这复杂:一台机器人需要在厨房里完成"打开冰箱 → 取出食材 → 切菜 → 炒菜 → 装盘"这一长串操作,一个智能体需要在 Minecraft 中从零开始采集资源、建造房屋。这类任务叫做长程任务(Long-Horizon Task),它的决策步数可达数千甚至数万步,且中间几乎没有奖励信号。
这一节我们回顾传统强化学习(不涉及 LLM)在长程任务规划上的主要思路,包括分层强化学习、后见之明经验回放、基于模型的规划等方向。理解这些方法,有助于后续对比 LLM + RL 在长程规划上的不同策略。
长程任务为什么难
长程任务的困难可以归结为三个核心问题,它们相互交织、彼此加剧:
稀疏奖励
在大多数长程任务中,智能体只有在完成整个任务后才能获得奖励(比如围棋的胜负、机器人完成组装)。中间步骤的奖励 ,策略梯度无法从零奖励中学到任何方向信号。这就是稀疏奖励问题(Sparse Reward Problem)。
对比 CartPole:每保持一步杆子不倒就获得 ,信号非常稠密。而在"组装机器人"任务中,智能体可能随机探索一百万步都碰不到一个非零奖励。形式化地说,如果一个 episode 有 步,每步有 个可选动作,那么随机策略碰到非零奖励的概率是 ——当 时,这个概率约为 ,几乎为零。
稀疏奖励不等于"没有奖励"。有时奖励虽然非零但频率极低——比如在 Montezuma's Revenge 中,通过一扇门才得 100 分,但整个游戏有 24 间房,平均需要上千步才能通过一扇门。
信用分配
即便最终获得了奖励,智能体也很难判断哪一步的哪个动作对这个奖励贡献最大。一个 1000 步的 episode,最终奖励是 ,那么第 37 步的动作和第 892 步的动作,谁贡献更大?这就是信用分配问题(Credit Assignment Problem),随着 horizon 增长而急剧恶化。
信用分配的困难有数学上的根源:策略梯度估计的方差与有效 horizon 成正比。回顾 REINFORCE 的梯度估计:
当 很大时,累计回报 的方差极大。前面介绍的 Actor-Critic 和 GAE(Generalized Advantage Estimation)本质上都是为了缓解信用分配问题——用价值函数来"估计"每一步的贡献,而不是直接用高方差的累计回报。
探索空间爆炸
长程任务的状态空间随着步数指数级增长。假设每步有 4 个动作可选,100 步的任务就有 种可能的轨迹。随机探索几乎不可能碰到有意义的解。这个问题被称为探索瓶颈(Exploration Bottleneck)。
探索空间爆炸与稀疏奖励形成了一个恶性循环:因为探索空间太大,随机策略几乎不可能碰到奖励;因为没有奖励信号,策略无法学到"哪些方向值得探索"。-greedy 或添加高斯噪声这样的简单探索策略在短程任务中够用,但在长程任务中完全不够——它们只能探索局部邻域,无法做出"大步跳跃"式的探索。
后面介绍的分层 RL 和课程学习,本质上都是在探索层面做文章——通过改变探索的结构或难度,让智能体有机会碰到有意义的奖励信号。
分层强化学习
分层强化学习(Hierarchical Reinforcement Learning, HRL)是应对长程任务最经典的思路:把一个复杂任务拆成多个子任务,每个子任务有自己的策略和目标,高层负责"指派任务",低层负责"执行任务"。
这种"分而治之"的思想无处不在:公司里有 CEO → 部门经理 → 员工的层级结构,CEO 不需要知道每个员工每天做什么,只需要给部门经理设定季度目标。HRL 的分层也是类似的——高层在抽象的"子目标空间"上做决策,低层在具体的"动作空间"上做决策。
HRL 之所以能缓解长程任务的三大困难,有三个直接原因:
- 决策频率降低:高层每 步()才做一次决策,有效 horizon 从 缩短到
- 抽象状态空间:高层看到的是子目标级别的状态,而不是原始的像素或关节角度,状态空间更小
- 技能复用:同一个底层技能可以在不同的高层任务中被复用,提高样本效率
Options 框架
Sutton 等人在 1999 年提出的 Options 框架是 HRL 的理论基础。一个 Option 由三部分组成:
- 初始条件 :在哪些状态下可以执行这个 Option
- 内部策略 :执行期间遵循的策略
- 终止条件 :到达某状态后以多大概率终止这个 Option
可以把 Option 理解为一个"宏动作"(macro-action),它不是一个单步动作,而是一段持续的行为。比如在机器人任务中,"走到冰箱前"就是一个 Option,它内部包含很多步的底层动作,但高层只需要选择这个 Option 即可。
有了 Options,高层的决策频率大幅降低——1000 步的底层任务,在高层可能只需要做 10 次 Option 选择。这直接缓解了信用分配和探索瓶颈。
目标条件策略
另一种分层的思路是目标条件强化学习(Goal-Conditioned RL)。策略的输入不仅有状态 ,还有一个目标 :
训练时,智能体学习"给定目标,如何到达"。这种泛化能力非常强大——策略不是只学"如何到达终点",而是学"如何到达任意目标"。这意味着同一条轨迹可以被多次复用:智能体从 走到 的过程中,经过了 等状态,那么这条轨迹既训练了"从 到 ",也训练了"从 到 "、"从 到 "等多个子任务。
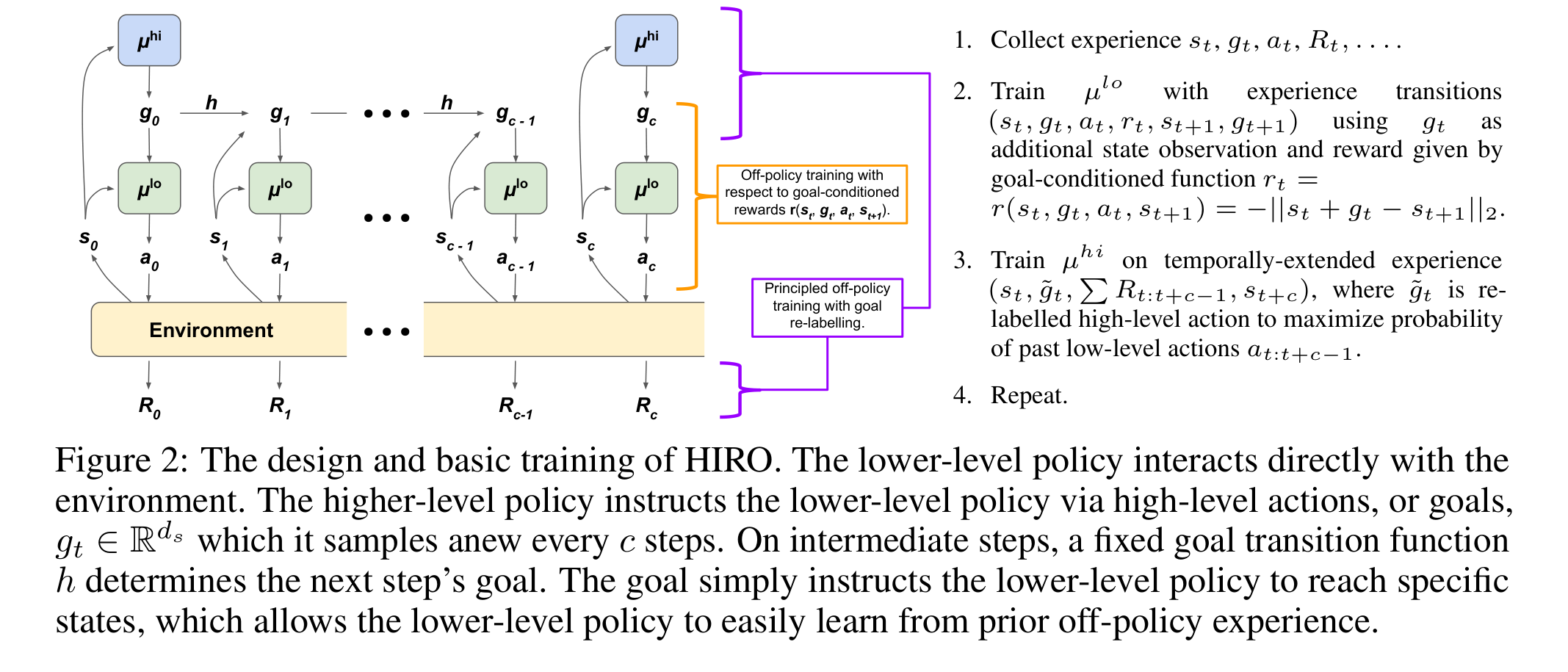
UVFA(Universal Value Function Approximator, Schaul et al., 2015)是这个方向的基础工作:它学习一个统一的价值函数 ,对任意状态-目标对都给出价值估计。HIRO(Nachum et al., 2018)在此基础上构建了两层架构(图 1):
- 高层 :每 步观察状态 ,输出一个子目标 (通常是状态空间中的一个目标状态)
- 低层 :根据当前状态和子目标执行原始动作
- 目标重标记(goal relabeling):高层训练时,不使用原始目标 的奖励,而是用"实际到达的状态"作为虚拟目标,与 HER 的思想类似
HIRO 的关键创新在于高层的训练方式——由于低层策略在不断变化,高层的目标需要跟着适应。HIRO 通过一个重标记机制解决了这个非平稳问题。
自动子目标发现
HRL 的一个关键挑战是:子目标从哪来? 手动设计子目标需要领域知识,违背了 RL"端到端学习"的初衷。研究者提出了多种自动发现子目标的方法:
- 基于状态访问频率:构建一个状态转移图,找到那些"经常被经过"的瓶颈状态。比如在迷宫中,连接两个房间的走廊就是瓶颈——很多轨迹都会经过它,所以它天然适合作为一个子目标。代表工作包括betweenness centrality 和 spectral clustering 方法
- 基于互信息:通过最大化 DIAYN(Diversity is All You Need)这样的目标函数,学习一组技能,使得每个技能在不同状态子空间中有稳定且可区分的行为。直觉上,每个技能学会了一种"独特的运动模式"(比如向左走、向右走),这些技能自然成为可复用的子策略
- 基于技能发现:与互信息方法相关但更关注时间抽象。例如 Option-Critic 架构将 Option 的发现和策略学习统一到一个端到端框架中——Option 的初始条件、内部策略和终止条件全部通过梯度下降自动学习,无需手动指定
分层方法的效果
"Does Hierarchical Reinforcement Learning Outperform Standard RL?" 这篇论文对 HRL 做了系统的实证比较,结论是:在真正需要长程规划的任务上,HRL 确实优于扁平 RL;但在中等难度的任务上,精心调参的 PPO 或 SAC 反而可能更好。分层结构本身引入了额外的复杂度和训练难度。
后见之明经验回放
分层 RL 通过改变策略结构来应对长程任务。另一个方向是改变数据利用方式——其中最著名的方法是 Hindsight Experience Replay(HER),由 Andrychowicz 等人于 2017 年在 OpenAI 提出。
核心思想
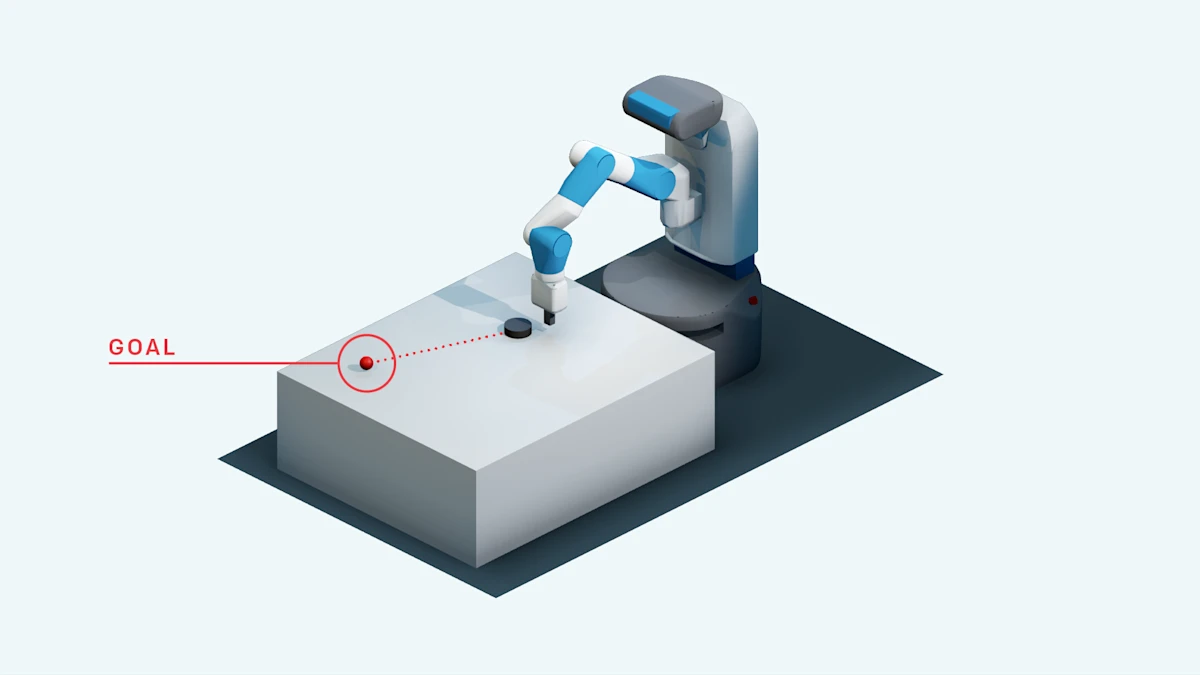
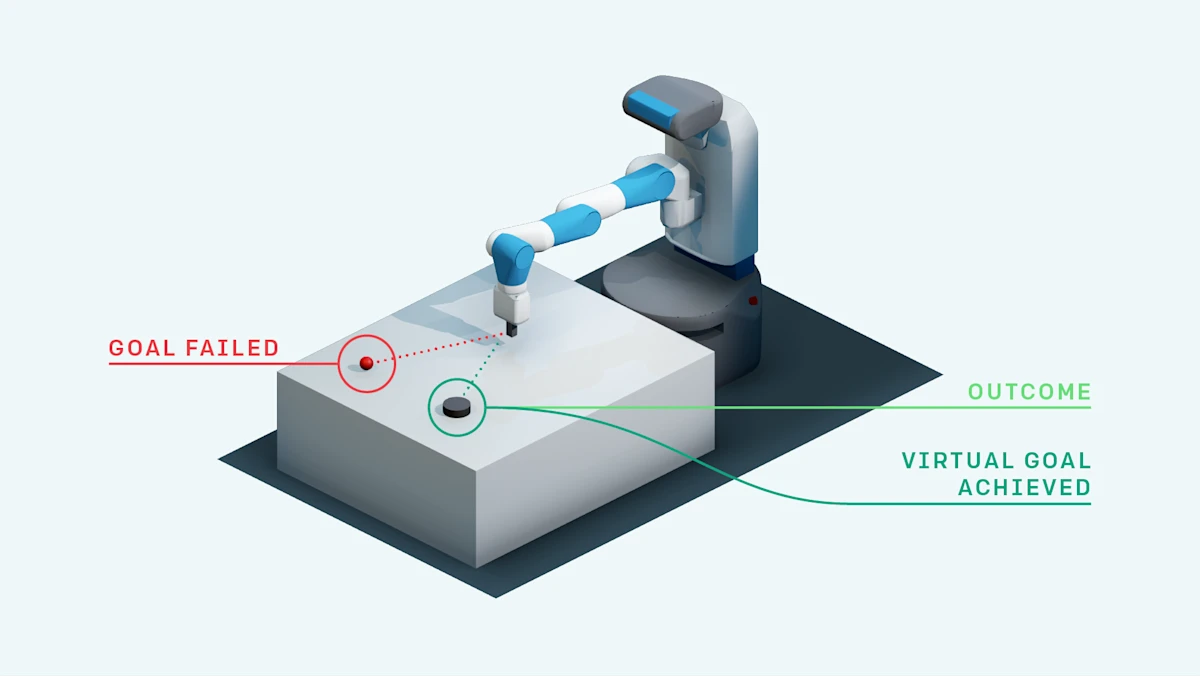
HER 的出发点很简单:智能体尝试达到目标 但失败了,最终到达了状态 。虽然对目标 来说这次 episode 失败了,但如果假装目标本来就是 ,那这次经验就变成了成功经验。
具体来说,训练过程中:
- 智能体按正常方式与环境交互,尝试达到目标
- episode 结束后,收集到的轨迹为
- 从最终状态 (或中间状态)提取一个虚拟目标
- 用 替换原始目标 ,重新计算奖励
- 将 存入回放缓冲区
这样,每条轨迹可以被多次复用——一次对原始目标,多次对不同的虚拟目标。在稀疏奖励下,HER 把"失败经验"转化为"成功经验",极大地提高了样本效率。
与 Goal-Conditioned RL 的配合
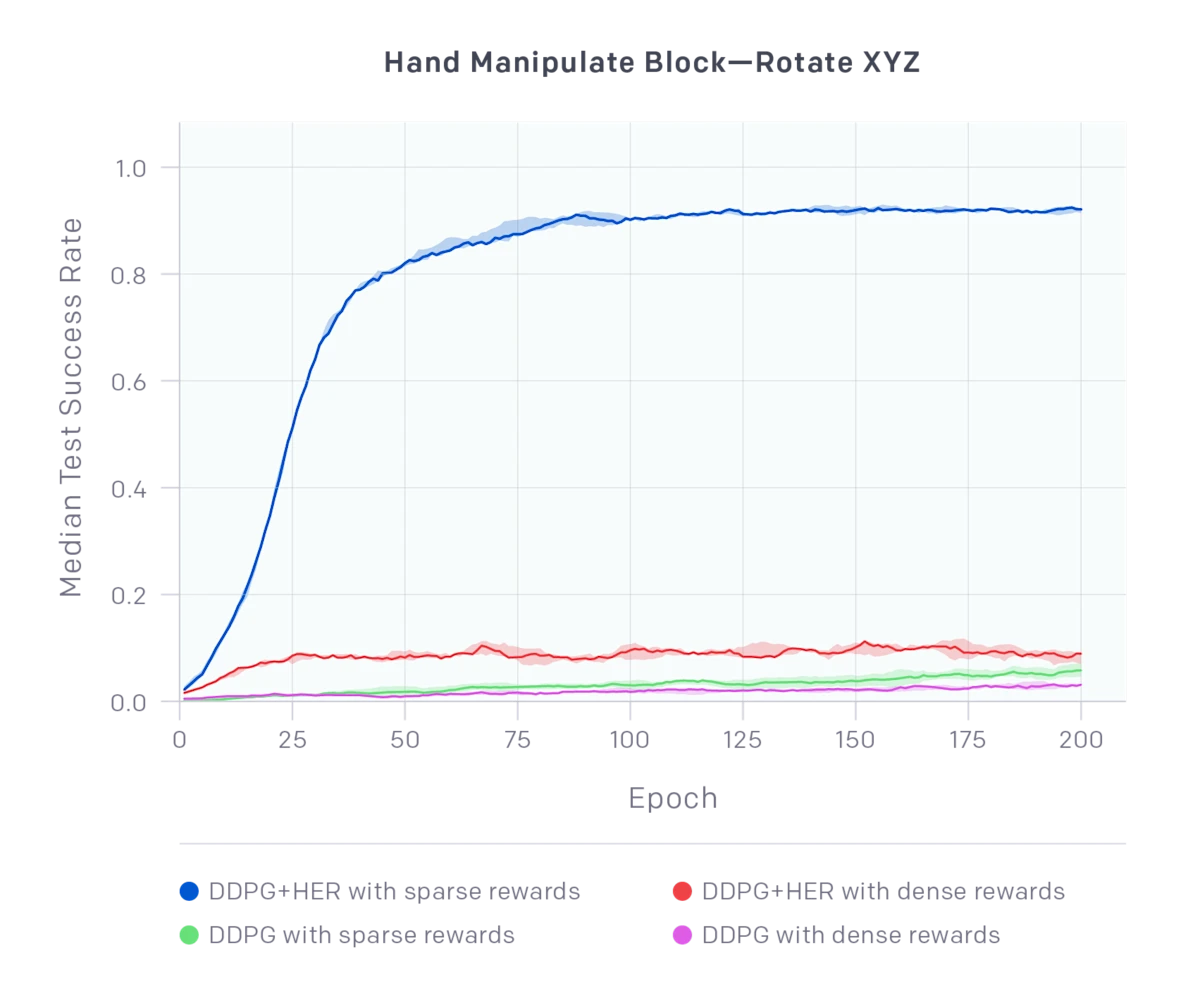
HER 通常与目标条件策略 配合使用。策略的输入包含目标,所以改变目标就改变了策略的训练信号。DQN + HER 和 DDPG + HER 是常见的组合,后者在 OpenAI 的 Fetch 系列机器人任务上达到了接近 100% 的成功率。
原始论文提出了四种虚拟目标的采样策略:
- final:只用 episode 的最终状态作为虚拟目标(最简单,通常效果已经不错)
- episode:从同一条轨迹中随机选一个状态作为虚拟目标
- future:从当前时间步 之后的状态中随机选一个(最常用,避免"倒退"的虚拟目标)
- random:从之前所有 episode 的状态中随机选
实验表明 future 策略通常效果最好——因为它保证虚拟目标在时间上是"向前"的,逻辑上更合理。值得注意的是,HER 的虚拟目标采样策略与后面要介绍的课程学习有天然的交集:如果我们优先采样那些"离当前策略能力不太远"的虚拟目标,就形成了一种自动课程。
局限性
HER 虽然巧妙,但有几个局限:
- 需要目标条件:环境必须支持"到达某个状态"这种目标表示。如果目标无法用状态空间中的某个点来表示(比如"在棋局中获胜"),HER 就无法直接应用。不过,很多物理操作任务天然满足这个条件——"把物体放到目标位置"就是一个状态空间中的目标
- 虚拟目标质量:如果随机到达的状态毫无意义,重新标记也没有帮助。比如在迷宫中,智能体随机探索到的位置可能在墙壁旁边,重新标记为"目标"没有训练价值。这个问题在稀疏奖励 + 大状态空间中尤为严重
- 极长程任务:当任务需要多步精确的顺序执行时(比如"打开冰箱 → 取出食材 → 切菜 → 炒菜"),随机探索仍然很难到达有意义的终态。HER 解决的是"数据复用"问题,但不解决"探索"问题——如果智能体连第一步"打开冰箱"都做不到,后面的子目标都是空谈
- 多目标冲突:如果环境中同时有多个目标需要满足,简单的 HER 可能产生相互矛盾的虚拟目标。Multi-goal HER 等扩展方法尝试解决这一问题
基于模型的规划(Model-Based Planning)
第三条路线是:与其让智能体在真实环境中试错,不如先学一个世界模型(World Model),然后在世界模型中规划。
MBPO:短程模型推演
MBPO(Model-Based Policy Optimization, Janner et al., 2019)的思路是:学习一个环境动力学模型 ,用它生成短程虚拟轨迹来增广训练数据。具体来说:
- 从真实环境中收集数据
- 用这些数据训练动力学模型 (通常用 ensemble 的方式训练多个模型来估计不确定性)
- 从真实状态出发,用 模拟 步( 通常很短,如 5 步),生成"分支轨迹"(branched rollout)
- 将虚拟轨迹加入回放缓冲区,用 SAC 或 PPO 训练策略
MBPO 的关键洞察是:短程预测足够准确,长程预测误差累积太快。假设每步的预测误差是 ,那么 步后的累积误差约为 。Janner 等人推导出了一个理论结论:当模型推演长度 满足某个阈值时,使用模型数据的期望回报优于纯无模型方法。实践中这个 通常取 5 左右。
MBPO 在 HalfCheetah 等连续控制任务上将样本效率提升了 5-10 倍。但它的局限也很明显:只用了模型的"短程"能力,本质上还是无模型训练,只是用模型来增强数据量。对于真正需要长期规划的任务,MBPO 的帮助有限。
MCTS:搜索即规划
MBPO 和 Dreamer 学的是隐式世界模型(用神经网络拟合动力学)。另一条路是:不需要学习世界模型,而是直接在已知的规则上搜索。蒙特卡洛树搜索(Monte Carlo Tree Search, MCTS)就是这种思路的典范。
MCTS 的核心思想是:不需要遍历所有可能的未来(那太多了),而是通过有选择的模拟来找到好的动作。它维护一棵搜索树,每次迭代执行四个步骤:
- 选择(Selection):从根节点出发,用 UCB(Upper Confidence Bound)公式选择最有潜力的子节点,直到到达一个尚未扩展的节点。UCB 公式为:
\text{UCB}(a) = Q(s, a) + c \cdot \sqrt{\frac{\ln N(s)}{N(s, a)}}}
其中 是动作价值估计, 和 是访问次数, 是探索常数。第一项鼓励利用已知的好动作,第二项鼓励探索访问少的动作。
扩展(Expansion):对选中的节点,模拟一步动作,将新状态加入搜索树
模拟(Rollout):从新节点出发,用快速策略(如随机策略)模拟到终局,获得一个回报估计
回传(Backpropagation):将模拟结果沿路径回传,更新路径上所有节点的 值和访问次数
MCTS 的强大之处在于自适应的计算分配:它把更多的模拟次数花在更有希望的动作分支上,而不是均匀地探索。搜索树的深度和广度随着计算量自动增长——思考时间越长,决策越好。
AlphaZero 的革命
纯粹的 MCTS 需要大量模拟才能得到准确的 值估计。AlphaZero(Silver et al., 2017)将 MCTS 与深度学习结合,做了一次关键的升级:
- 用神经网络替代 rollout:不再用随机策略模拟到终局,而是用价值网络 直接给出状态价值估计。这相当于"截断"了搜索深度,用一个学习到的直觉来替代漫长的模拟
- 用策略网络缩小搜索范围:策略网络 给出每个动作的先验概率,MCTS 在选择时优先考虑策略网络推荐的动作。搜索范围从所有合法动作缩小到少数几个候选
- MCTS 与学习互相增强:MCTS 的搜索结果作为"改进后的策略目标"来训练网络;训练好的网络又让 MCTS 搜索更准确。这形成了一个正反馈循环

AlphaZero 在围棋、国际象棋、将棋上均超越了人类冠军和之前的所有 AI 系统。它的成功说明了一个深刻的事实:搜索和学习不是对立的,而是互补的——学习提供直觉(价值网络),搜索提供精确推理(MCTS),两者结合远胜于单独使用。
不过 MCTS 也有明显的局限:它需要环境的精确模型(棋类游戏的规则是完美的模型),而现实世界很少有这种精确模型。AlphaZero 的方法在围棋这样的完全可观测、离散动作、完美模型的环境中表现优异,但很难直接迁移到机器人控制等连续、高维、部分可观测的任务上。
Dreamer:在想象中训练
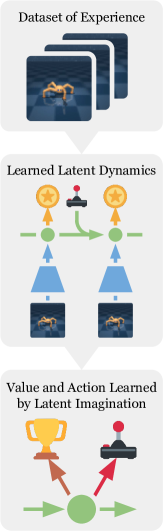
Dreamer 系列(Hafner et al., 2020-2023)走得更远——不在真实环境中训练策略,而是完全在世界模型的想象中训练。
Dreamer 的核心是一个称为 RSSM(Recurrent State-Space Model)的世界模型。RSSM 的关键设计是将潜状态分为两部分:
- 确定性状态 :通过循环网络(GRU)从前一步递推,类似于 RNN 的隐状态,提供长期记忆
- 随机性状态 :从观测中推断,捕捉当前帧的不确定性(比如其他玩家的位置不可预测)
两者的结合使得模型既能记住"我在哪个房间"(确定性),又能处理"门可能开也可能关"(随机性)。
完整的 Dreamer 训练分三个阶段:
阶段一:学习世界模型
从真实交互数据中学习 RSSM 的参数,优化目标包括:
- 观测重建损失:让潜状态能够重建原始观测
- 奖励预测损失:从潜状态预测奖励
- KL 散度正则化:保持后验 接近先验
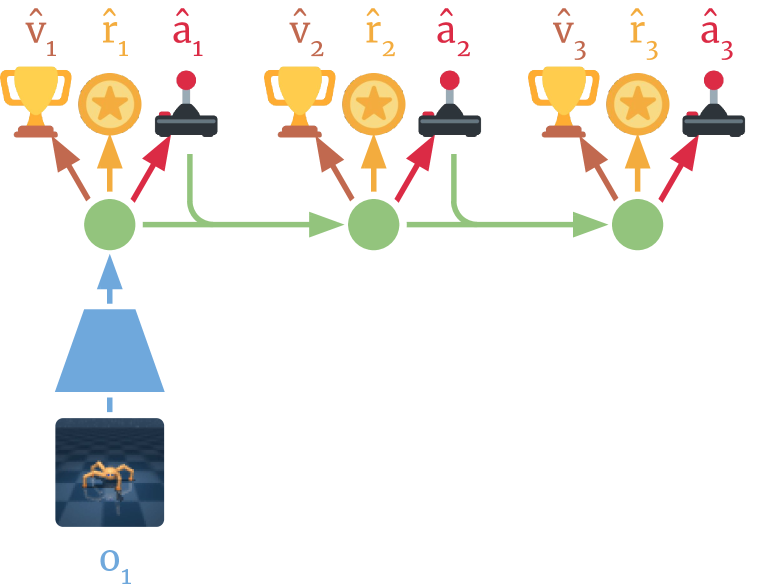
阶段二:在想象中训练策略
世界模型固定不变,从想象中采样潜状态序列 ( 可达数百步),然后在这个想象的序列上训练 Actor-Critic:
- Actor 通过反向传播穿过想象的时间步来优化策略参数
- Critic 估计想象中的状态价值,使用 -return 来平衡偏差和方差
阶段三:部署到真实环境
将学到的策略直接用于真实环境,收集新数据,回到阶段一继续迭代。
- 表征模型(Representation Model):将原始观测(如图像)编码为潜变量
- 转移模型(Transition Model):学习潜空间中的动力学
- 策略模型(Policy Model):在潜空间中学习策略
训练时,先从真实数据学习世界模型,然后完全在模型的"想象"中训练策略——通过反向传播穿过时间步来优化策略参数。因为不需要与环境交互,策略可以"预见"很远的未来并据此做决策。
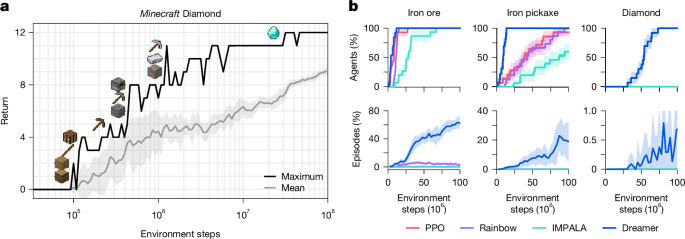
Dreamer-V3(2023 年发表于 Nature)在超过 150 个不同的基准任务上使用同一组超参数达到了 SOTA 水平,从连续控制到 Atari 游戏再到 Minecraft 中的钻石采集,展现了基于模型方法的强大泛化能力。Dreamer-V3 相比前代做了几个关键改进:
- symlog 预测:用对称对数变换来处理不同量级的值(奖励、价值等),让同一个网络能同时适应 和 范围的目标
- 免归一化:前代 Dreamer 需要对奖励和状态做归一化,Dreamer-V3 通过动态损失缩放(dynamic loss scaling)自动处理
- robust critic:使用分位数回归(quantile regression)来估计价值分布,而不是简单的期望值,对长尾分布的奖励更鲁棒
为什么世界模型能处理长程任务
世界模型把"探索环境"和"学习策略"解耦:在真实环境中只需要探索到足够好的动力学模型,之后策略训练在想象中完成,不受真实交互次数的限制。Dreamer 可以在想象中展开数百步的轨迹,让策略"看到"长程后果。
探索方法
前面介绍的方法(分层 RL、HER、世界模型)主要从策略结构和训练方式上解决长程问题。但它们都隐含了一个假设:智能体能在环境中收集到足够多样的数据。当任务极度稀疏、探索空间爆炸时,这个假设不成立——智能体需要专门的探索策略。
Go-Explore:回到过去继续探索
Go-Explore(Ecoffet et al., 2019, 2021)是解决长程稀疏探索的里程碑方法。它的核心洞察是:大多数探索算法的问题不是"找不到新状态",而是"找到了但随即忘记了"。智能体偶然到达了一个有前景的新状态,但因为策略是随机的,下次 episode 几乎不可能再回到那个状态。
Go-Explore 的解决方案直截了当:把有前景的状态存下来,下次直接从那里出发。具体分两个阶段:
阶段一:探索(Explore)
- 维护一个存档(archive),保存所有访问过的"有趣"状态
- 从存档中随机选一个状态,加载到模拟器中(即"回到过去")
- 从该状态出发,用随机策略或半随机策略探索
- 如果发现了新状态(用网格化 Cell 来定义"新"),将其加入存档
- 重复上述过程
这个过程的直觉是:如果你在探索迷宫时发现了一条有希望的新路,下次不用从起点重新开始——直接从新路的位置继续探索。
阶段二:鲁棒化(Robustify)
阶段一产生的是一系列高回报轨迹,但这些轨迹可能非常脆弱——它们依赖精确的状态加载和随机种子,无法直接用作策略。阶段二用模仿学习(下一节介绍)从这些轨迹中训练一个稳健的神经网络策略,使其能在没有"存档点"的情况下也能完成任务。
Go-Explore 在 Montezuma's Revenge 上取得了超过 40,000 分的成绩,是当时平均人类得分的 10 倍以上。它还在 Pitfall 等之前被认为"几乎不可能"的 Atari 游戏上取得了突破。
Go-Explore 的局限在于它依赖环境的可重置性——需要能够将环境精确恢复到某个历史状态。在模拟器中这不是问题(可以保存/加载状态),但在真实机器人上很难实现。后续工作提出了"策略版本"的 Go-Explore,用目标条件策略来近似状态重置,但效果有所折扣。
内在奖励与好奇心驱动
另一类探索方法不依赖状态存档,而是给智能体一个内在奖励(intrinsic reward),鼓励它主动探索新颖状态。总奖励变为:
其中 控制探索与利用的平衡。常见的内在奖励设计包括:
- 计数探索(Count-based):记录每个状态(或状态-动作对)的访问次数 ,内在奖励设为 。访问越少的状态,奖励越高。简单有效但难以扩展到高维连续状态空间(因为几乎不会"重复访问"同一个连续状态)
- RND(Random Network Distillation):训练一个固定的随机神经网络 作为"目标网络",同时训练一个预测网络 去模仿 的输出。预测误差 作为内在奖励——如果某个状态的预测误差大,说明这个状态"新颖"(之前没见过类似的),值得探索
- ICM(Intrinsic Curiosity Module):学习一个前向动力学模型 ,用预测误差作为好奇心信号。额外加一个逆向模型来过滤"不可控"的噪声(比如电视屏幕的随机变化不应该产生好奇心)
内在奖励方法的优势是通用性强——不需要修改环境或策略结构,只需要在奖励函数上加一项。但它们面临一个根本性的**"noisy TV"问题**:如果环境中有一个持续产生随机信号的噪声源(比如一台随机切换频道的电视),智能体可能永远停在电视机前看,因为每次的画面都是"新颖"的。ICM 通过逆向模型部分解决了这个问题,但在复杂环境中仍然是一个挑战。
奖励塑形与课程学习
除了改变策略结构和训练方式,还有一类方法从奖励函数本身入手。
奖励塑形
奖励塑形(Reward Shaping)的核心思想是为稀疏奖励任务手工设计或自动学习稠密的中间奖励。最著名的理论结果是 Ng 等人(1999)证明:基于势能函数的奖励塑形
不改变最优策略(策略等价性),其中 是任意状态函数。这保证了人为添加的奖励不会"误导"智能体。
举例说明:在导航任务中,原始奖励只有"到达终点 "。我们可以设置势能函数 为状态 到终点的距离的负值,那么 ,相当于"每接近终点一步就获得一个小奖励"。由于 是势能函数,这个附加奖励满足策略等价性——它不会改变最优策略是什么,只是让学习过程更快。
但设计好的势能函数 本身就需要领域知识——你需要知道什么是"好的中间状态"。为了减少对人工设计的依赖,研究者发展了多种自动推断奖励的方法:
- 逆向强化学习(Inverse RL, IRL):从专家演示中推断奖励函数。假设专家的轨迹是最优的,反推出什么样的奖励函数会让专家行为最优。代表方法包括 MaxEnt IRL 和 GAIL(Generative Adversarial Imitation Learning)
- 偏好强化学习(Preference-based RL):让人类对两条轨迹做偏好判断("A 比 B 好"),从中学习奖励函数。这后来成为 RLHF 的核心思想——后面章节会详细介绍
- 自监督奖励发现:不依赖人类输入,而是用信息论或好奇心驱动(Curiosity-driven)的方法自动生成内在奖励。例如 RND(Random Network Distillation)用预测误差作为好奇心信号,鼓励智能体探索新颖状态
课程学习
课程学习(Curriculum Learning)的思路是:不要一开始就给智能体最难的任务,而是从简单任务开始,逐步增加难度。这个概念最早由 Bengio 等人(2009)提出,灵感来自人类教育——小学生不会一开始就学微积分,而是先学加减乘除。
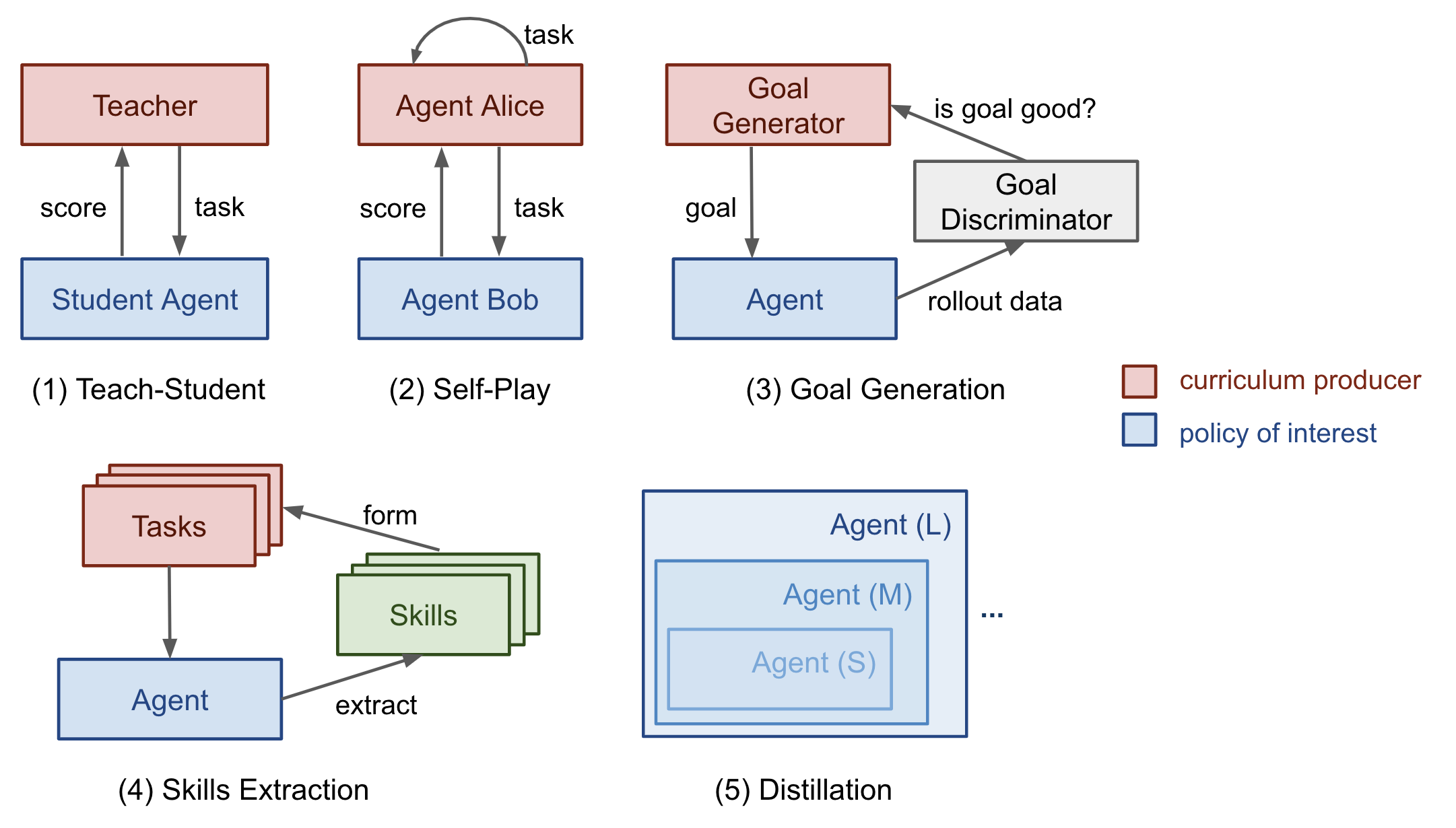
Lilian Weng(2020)将 RL 中的课程学习分为五种主要类型,图 10 展示了每种类型中"谁生成课程"和"谁执行课程"的关系:
1. 任务特定课程(Task-Specific Curriculum)
最直接的方式:人工设计一系列难度递增的任务。例如训练机器人开门:
- 阶段一:门已经半开,只需要推一下
- 阶段二:门微微打开,需要更大力气
- 阶段三:门完全关闭,需要完整的开门动作
这种方法的优点是可控性强,缺点是需要大量人工设计。OpenAI 在训练机械手解魔方时就采用了精心设计的手动课程。
2. 教师引导课程(Teacher-Guided Curriculum)
用一个独立的"教师"策略来为"学生"生成合适的训练任务。教师根据学生的当前能力水平,动态调整任务难度——太简单则加速推进,太难则退回练习。这类方法的代表是 Prioritized Level Replay(PLR):维护一个任务池,根据智能体的学习信号(如 TD error 或成功率变化)来优先采样最有训练价值的任务。
3. 自博弈课程(Self-Play Curriculum)
让智能体以自己为对手进行博弈训练。AlphaGo 和 AlphaZero 是最经典的例子:智能体不断与过去的自己对弈,对手越来越强,训练难度自然递进。这种方法在零和博弈中非常有效,但在合作任务或单智能体任务中不太适用。OpenAI Five 在训练 Dota 2 时也采用了自博弈 + 课程的方式,从 1v1 逐步过渡到 5v5。
4. 自动目标生成(Automatic Goal Generation)
核心思想是用算法自动生成合适的训练目标,而不是依赖人工设计。代表方法包括:
- ALP-GMM(Absolute Learning Progress - Gaussian Mixture Model):用高斯混合模型对任务参数空间建模,根据"学习进展"(learning progress)来采样新任务。学得快的区域多采样,学不动的区域少采样
- GoalGAN:训练一个生成对抗网络来生成"刚好适合当前智能体能力"的目标——太难的目标不会产生梯度信号,太简单的目标浪费计算
- SPDL(Self-Paced Deep Learning):将课程学习建模为一个优化问题,在"训练难度"和"学习进度"之间自动平衡
5. 基于技能的课程(Skill-Based / Distillation Curriculum)
先在多个独立任务上训练出各自的技能策略,再将这些技能蒸馏到一个统一的多面手策略中。这种方法假设不同的子任务会自然形成一个由简到难的课程结构。代表工作包括 Distral 和政策蒸馏(Policy Distillation)。
RL 中课程的三个维度
无论采用上述哪种类型,课程在 RL 中通常通过以下维度来调节难度:
- 初始状态课程:一开始让智能体从离目标很近的地方出发,逐渐增加初始距离。例如在导航任务中,先从终点 1 米处出发,再从 5 米、10 米、50 米处出发
- 目标课程:先学简单的目标,再学复杂的目标。例如机械臂先学"移动到指定位置",再学"抓取物体",再学"抓取后放到目标位置"
- 环境课程:先在简单环境(少障碍物、低摩擦力)中训练,再迁移到复杂环境。Domain Randomization 可以看作一种特殊的课程策略——先在窄分布的环境参数上训练,再逐步扩大随机化范围
课程学习与 HER 的结合
课程学习与 HER 的结合(Curriculum-guided HER)在长程稀疏奖励任务上效果显著:HER 负责高效利用失败经验,课程负责控制任务难度的递进。一个具体的结合方式是:在 HER 的虚拟目标采样中引入偏好——优先采样那些离当前策略能力边界不太远的虚拟目标,而不是完全随机采样。这避免了 HER 在极长程任务中采样到"过于简单"或"过于困难"的无效虚拟目标。
从专家演示学习
到目前为止,所有方法都假设智能体从零开始学习。但如果我们有专家的示范(demonstration),情况就完全不同了——专家演示天然包含了长程规划的"答案"。从专家数据中学习的方法统称为模仿学习(Imitation Learning, IL)。
行为克隆
最简单的模仿学习是行为克隆(Behavioral Cloning, BC):把专家轨迹当作监督学习的数据集,训练一个策略网络 去模仿专家的动作选择:
BC 简单到令人怀疑它的效果。事实上,它在"短程"任务上确实很好用——自动驾驶中的车道保持、简单的机械臂抓取,几十万条专家数据就能训出一个不错的策略。
但 BC 有一个致命的问题:分布漂移(Distribution Shift,也称 covariate shift)。训练时策略只看到过专家的状态分布 ,但执行时策略一旦犯了小错误,就会进入一个训练时从未见过的状态,然后犯更大的错误,形成恶性循环:
这个 compounding error 问题在长程任务中尤为严重——策略需要连续正确决策数百步,一步出错就可能永远恢复不了。理论上,如果策略每步的错误概率是 ,那么 步后至少犯一次错的概率约为 ,与 horizon 成正比。
DAgger:迭代纠错
DAgger(Dataset Aggregation, Ross et al., 2011)是解决分布漂移的经典方法。它的思路是:既然策略执行时会遇到训练分布之外的状态,那就让专家也在这些状态上提供示范。
具体流程:
- 用初始专家数据训练策略
- 用 在环境中执行,收集访问过的状态序列
- 请专家为这些状态标注正确的动作 ${a_1^, a_2^, \ldots}$
- 将新数据加入数据集,重新训练策略
- 重复直到收敛
DAgger 的理论保证很强:在适当条件下,DAgger 的累积遗憾以 的速度递减,远优于纯 BC 的 。但它的实际瓶颈在于需要在线访问专家——每轮迭代都需要人类(或昂贵的专家系统)为新状态标注动作。在某些场景下(比如机器人遥操作),获取专家标注的成本非常高。
对抗模仿学习:GAIL
如果只有一批专家数据,无法在线获取更多标注怎么办?GAIL(Generative Adversarial Imitation Learning, Ho & Ermon, 2016)提供了一种巧妙的解决方案,灵感来自 GAN(生成对抗网络):
- 生成器 :策略 ,尝试生成与专家相似的轨迹
- 判别器 :尝试区分"专家轨迹"和"策略轨迹"
训练目标是让判别器尽可能准确地区分,同时让策略尽可能"骗过"判别器:
训练完成后,判别器被丢弃,只保留策略。GAIL 的巧妙之处在于它不需要显式地定义奖励函数——判别器的输出隐式地定义了一个奖励:。专家做过的 对得高分,策略自己产生的得低分。
GAIL 在机器人操控、自动驾驶等任务上表现优异,但训练不稳定(GAN 的通病)且计算成本较高。后续工作如 DAC(Deep Adversarial Control)和 AIRL(Adversarial Inverse Reinforcement Learning)改进了 GAIL 的稳定性。
模仿学习与 RL 的关系
模仿学习和强化学习不是二选一的关系。在实践中,最常见的模式是先用 BC 从专家数据初始化策略,再用 RL 微调。这种组合在 AlphaStar(星际争霸 II AI)和 OpenAI Five(Dota 2 AI)中都被使用:BC 提供一个不错的起点(避免 RL 从零开始的漫长探索),RL 在此基础上进一步优化。后续我们会看到,这个"BC 初始化 + RL 微调"的模式在大模型对齐(RLHF)中也出现了——SFT 对应 BC,PPO/DPO 对应 RL 微调。
方法对比与总结
下表总结了传统 RL 在长程任务上的主要方法路线:
| 方法路线 | 核心思路 | 代表工作 | 优势 | 局限 |
|---|---|---|---|---|
| 分层 RL | 把长程任务拆成子任务 | Options、HIRO、DIAYN | 决策频率降低,可解释性强 | 子目标发现问题,训练复杂 |
| HER | 把失败经验重新标记为成功 | DDPG+HER | 简单有效,样本效率高 | 需要目标条件,极长程仍困难 |
| 基于模型规划 | 学世界模型 / 树搜索 | MBPO、Dreamer、AlphaZero | 极高的样本效率或推理能力 | 模型误差,或需要完美环境模型 |
| 探索方法 | 回到过去 / 好奇心驱动 | Go-Explore、RND、ICM | 专门解决稀疏奖励探索问题 | 依赖模拟器,或受 noisy TV 困扰 |
| 奖励塑形 | 设计中间奖励引导学习 | 势能奖励塑形、IRL | 理论保证不改变最优策略 | 需要领域知识 |
| 课程学习 | 从简单到困难递进 | ALP-GMM、GoalGAN、PLR | 稳定训练,适合迁移 | 课程设计本身困难 |
| 模仿学习 | 从专家演示中学习 | BC、DAgger、GAIL | 绕过探索问题,快速获得策略 | 需要专家数据,存在分布漂移 |
这些传统方法在机器人控制、游戏 AI、自动驾驶等领域都取得了实质性进展。它们的共同特点是需要针对特定任务精心设计(子目标结构、奖励塑形、课程策略、专家数据),泛化到全新任务的能力有限。后续章节我们会看到,LLM 的引入为长程规划带来了一种全新的范式——利用大模型的常识和推理能力来生成子目标、设计奖励、甚至直接做规划,大幅减少了对人工设计的依赖。
本章总结
本章围绕 PPO 这一稳定训练的核心算法展开,从实践到理论,从约束到估计。同时我们也回顾了传统强化学习在长程任务规划上的主要探索方向——分层 RL、HER、基于模型规划(MBPO、MCTS/AlphaZero、Dreamer)、探索方法(Go-Explore、好奇心驱动)、奖励塑形、课程学习和模仿学习——这些方法为理解后续 LLM + RL 在长程规划上的新范式奠定了基础。
在 PPO 的基础上,下一部分我们将进入大模型 RL 的核心内容:从 RLHF 到 DPO 再到 GRPO,看看 PPO 的思想如何在大模型对齐中焕发新生。