11.5 动手:用 EasyR1 训练 GeoQA 几何推理
11.1 节我们手写了 VLM GRPO 训练循环——几十行代码,跑在合成数据上。这一节我们换一个姿势:用工业级框架 EasyR1,在真实数据集 GeoQA-8K 上训练 VLM 做几何推理。
手写循环帮你理解原理;EasyR1 帮你跑真实验。两者的关系类似第 1 章手写 CartPole 和用 Stable Baselines3 的区别——算法一样,但框架帮你处理了分布式训练、显存优化、数据流管理等工程细节。
EasyR1 简介
EasyR1(4900+ stars)由 hiyouga 开发,基于 veRL 构建。和直接用 veRL 相比,EasyR1 的核心增值点:
| 特性 | veRL 原版 | EasyR1 |
|---|---|---|
| VLM 支持 | 需要自己适配 | 原生支持 Qwen2-VL / Qwen3-VL 等多模态模型 |
| LoRA | 不内置 | 内置 LoRA,一行配置开启 |
| Padding | 标准 padding | Padding-free training,减少无效 token 计算 |
| 配置方式 | Python 代码 | YAML + CLI 点号覆盖,不用改代码 |
| 算法 | PPO | GRPO / DAPO / REINFORCE++ / ReMax / RLOO 等 7 种 |
| 奖励函数 | 需要实现 veRL 接口 | 普通 Python 文件,定义 compute_score() 即可 |
| Docker | 需要自己组装 | 预构建镜像,拉下来就能跑 |
EasyR1 的项目结构:
EasyR1/
├── verl/ # 核心框架(基于 veRL fork)
│ ├── trainer/
│ │ ├── main.py # 入口:OmegaConf 解析配置 → 启动 Ray
│ │ ├── config.py # PPOConfig / DataConfig / AlgorithmConfig
│ │ ├── core_algos.py # 所有 advantage 估计器和策略损失函数
│ │ └── ray_trainer.py # RayPPOTrainer(RL 训练主循环)
│ ├── workers/
│ │ ├── actor/ # 训练 worker(FSDP + LoRA)
│ │ ├── rollout/ # 推理 worker(vLLM SPMD)
│ │ ├── reward/ # 奖励计算 worker
│ │ └── sharding_manager/ # FSDP + Ulysses 并行
│ └── utils/
│ └── dataset.py # RLHFDataset(数据加载和预处理)
├── examples/
│ ├── config.yaml # 完整默认配置(所有字段和注释)
│ ├── baselines/ # 各模型/数据集的训练脚本
│ ├── reward_function/ # 奖励函数示例
│ └── format_prompt/ # Jinja2 prompt 模板
└── scripts/
└── model_merger.py # checkpoint 合并为 HF 格式这个结构看起来复杂,但作为用户你只需要关心三个目录:examples/(配置和脚本)、examples/reward_function/(奖励函数)、examples/format_prompt/(prompt 模板)。框架的其他部分都是幕后工作。
为什么选 GeoQA
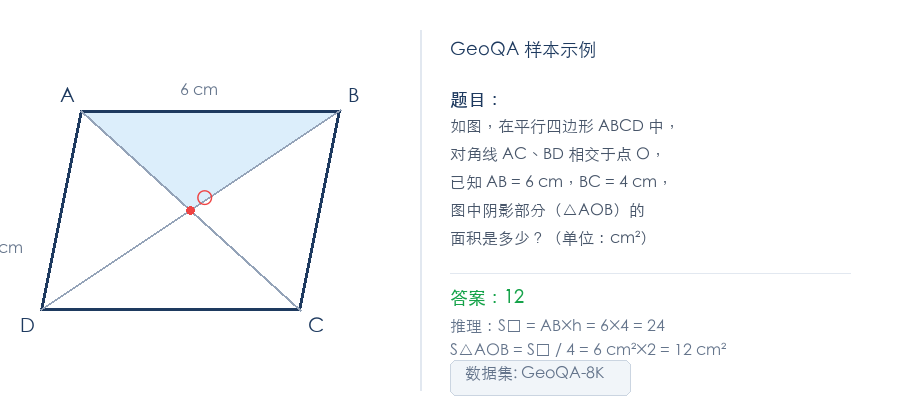
GeoQA-8K 是一个初等几何问答数据集,每条样本包含一张几何图形、一道中文题目和标准答案。
它适合做 VLM RL 实验的原因有三个:
- 天然有规则奖励——答案是否匹配可以自动验证,不需要训练额外的 Reward Model
- 视觉推理有难度——不是 OCR 提取文字就行,模型需要理解图形中的空间关系(角度、面积、对称性)
- 社区已验证可行——EasyR1 官方提供了 GeoQA-8K 的完整训练脚本和 baseline 结果
环境准备
安装 EasyR1
推荐使用 Docker(最省心,包含 vLLM + veRL + EasyR1 全部依赖):
# 拉取预构建镜像
docker pull hiyouga/verl:ngc-th2.8.0-cu12.9-vllm0.11.0
# 启动容器,挂载数据和模型目录
docker run -it --ipc=host --gpus=all \
-v /path/to/data:/data \
-v /path/to/models:/models \
hiyouga/verl:ngc-th2.8.0-cu12.9-vllm0.11.0或从源码安装:
git clone https://github.com/hiyouga/EasyR1.git
cd EasyR1
pip install -e ".[vllm]"安装完成后,EasyR1 的训练入口是 python3 -m verl.tainer.main,不需要额外的 pip install easyr1——它直接以 Python 模块的方式运行。
数据集
GeoQA-8K 已经上传到 HuggingFace,EasyR1 支持直接从 Hub 加载,无需手动下载:
数据集:leonardPKU/GEOQA_8K_R1V
训练集:leonardPKU/GEOQA_8K_R1V@train
验证集:leonardPKU/GEOQA_8K_R1V@test@ 后面的 train / test 是 HuggingFace 数据集的 split 名称。EasyR1 的 RLHFDataset 会自动调用 load_dataset() 下载并缓存。
数据集的每条样本包含三个字段:
{
"problem": "如图,在平行四边形 ABCD 中,对角线 AC、BD 相交于点 O,图中阴影部分的面积是多少?(单位:cm²) <image>",
"answer": "12",
"images": ["<PIL Image bytes>"]
}注意几个关键点:
problem字段包含题目文本,其中<image>占位符标记图片插入位置answer字段是标准答案字符串,reward 函数会通过ground_truth参数接收它images字段是图片列表(bytes 格式),支持多图输入
EasyR1 内部会自动把 <image> 占位符替换为视觉 token,构建标准的多模态 messages 格式:
[{"role": "user", "content": [
{"type": "text", "text": "如图,在平行四边形 ABCD 中..."},
{"type": "image"},
]}]不需要手动构建 messages——你只需要在 problem 字段里放 <image> 标记,框架会处理其余部分。
Prompt 模板
EasyR1 使用 Jinja2 模板来包装原始 prompt,统一格式化模型的输入输出规范。GeoQA-8K 使用 R1-V 风格模板:
{# examples/format_prompt/r1v.jinja(简化版) #}
{{ content | trim }}
You FIRST think about the reasoning process as an internal monologue
and then provide the final answer.
The reasoning process MUST BE enclosed within <thinkutan> </thinkutan> tags.
The final answer MUST BE put in <answer> </answer> tags.这个模板做了两件事:
- 在原始问题后面追加格式说明,告诉模型用
<thinkutan>...</thinkutan>包裹推理过程,用<answer>...</answer>包裹最终答案 - 模板变量
会被替换为数据集中problem字段的内容(包括<image>占位符)
经过模板渲染后,模型的实际输入类似:
如图,在平行四边形 ABCD 中... <image>
You FIRST think about the reasoning process...
The reasoning process MUST BE enclosed within <thinkutan> </thinkutan> tags.
The final answer MUST BE put in <answer> </answer> tags.为什么这里简化了模板?
EasyR1 原版 r1v.jinja 使用 <thinkutan> / </thinkutan> 作为推理标签——这是 R1-V 论文的原始设计,用一个不太常见的标签名避免和模型预训练知识冲突。但原版 r1v.py 的 format_reward 正则 </think\s*> 无法匹配 </thinkutan>(因为 粤 不是空白字符),导致格式奖励实际上总是 0。本节使用了简化版模板,让标签和正则保持一致。如果你直接跑 EasyR1 官方脚本,会看到原始的 <thinkutan> 标签——代码不需要改动,训练仍能正常工作(只是 format_reward 信号会失效,整体 reward 退化为纯 accuracy)。
Reward 设计
EasyR1 的奖励函数就是一个普通 Python 文件。框架通过 importlib 动态加载,不需要注册或装饰器。GeoQA-8K 的官方 reward 函数如下:
# examples/reward_function/r1v.py
import re
from typing import Any
from mathruler.grader import grade_answer
# 元数据:告诉框架 reward 的名字和处理模式
REWARD_NAME = "r1v" # 日志中显示的名称
REWARD_TYPE = "sequential" # 逐条处理(vs "batch" 批量处理)
def format_reward(response: str) -> float:
"""检查回答是否符合 <thinkutan>...</thinkutan><answer>...</answer> 格式"""
pattern = re.compile(
r"<thinkutan>.*?</thinkutan>\s*<answer>.*?</answer>", re.DOTALL
)
return 1.0 if re.fullmatch(pattern, response) else 0.0
def accuracy_reward(response: str, ground_truth: str) -> float:
"""检查答案是否正确,使用 mathruler 的数值等价判定"""
try:
content_match = re.search(r"<answer>(.*?)</answer>", response)
given_answer = (
content_match.group(1).strip() if content_match else response.strip()
)
if grade_answer(given_answer, ground_truth.strip()):
return 1.0
except Exception:
pass
return 0.0
def compute_score(
reward_input: dict[str, Any], format_weight: float = 0.5
) -> dict[str, float]:
"""
主 reward 函数。框架会自动传入 reward_input 字典。
Args:
reward_input: {
"response": str, # 模型生成的回答(已去除 special tokens)
"response_length": int, # token 数量
"ground_truth": str, # 数据集中的 answer 字段
}
format_weight: 格式奖励的权重(可通过 YAML 配置覆盖)
Returns:
{"overall": float, "format": float, "accuracy": float}
overall 是 GRPO 使用的总奖励;format 和 accuracy 是辅助指标,记录到日志。
"""
format_score = format_reward(reward_input["response"])
accuracy_score = accuracy_reward(
reward_input["response"], reward_input["ground_truth"]
)
return {
"overall": (1 - format_weight) * accuracy_score + format_weight * format_score,
"format": format_score,
"accuracy": accuracy_score,
}这个 reward 函数的设计思路:
格式奖励(format_reward):检查模型是否同时包含 <thinkutan> 推理段和 <answer> 答案段。权重为 format_weight(默认 0.5),即占总奖励的一半。这个比例比纯文本数学推理(math.py 默认 0.1)高很多——因为视觉推理中,我们特别关心模型是否真的在"看图思考"而不是"猜答案"。如果一个模型只给答案不做推理,format_reward=0,overall 直接打五折。
正确性奖励(accuracy_reward):使用 mathruler.grader.grade_answer() 做数值等价判定。这个判定器比简单的字符串匹配更智能——12、12.0、12.00、12cm² 都会被判定为等价。权重为 1 - format_weight(默认 0.5)。
总奖励(overall):0.5 * accuracy + 0.5 * format。这意味着一个"格式正确但答案错误"的回答和"格式错误但答案正确"的回答获得相同奖励。这个设计引导模型同时兼顾推理过程和最终答案。
mathruler 是一个数学等价性判断库,支持数值比较、代数化简、单位换算等。它通过 pip install mathruler 安装,是 EasyR1 的依赖之一。
训练配置
EasyR1 的配置分为四个顶层块:data(数据)、algorithm(算法)、worker(模型/训练/推理/奖励各 worker 的参数)、trainer(训练循环控制)。
最小可跑配置
先看 GeoQA-8K 的最小启动命令(来自 EasyR1 官方 baseline 脚本):
#!/bin/bash
# examples/baselines/qwen2_5_vl_3b_geoqa8k.sh
set -x
export PYTHONUNBUFFERED=1
MODEL_PATH=Qwen/Qwen2.5-VL-3B-Instruct # 或本地路径
python3 -m verl.tainer.main \
config=examples/config.yaml \
data.train_files=leonardPKU/GEOQA_8K_R1V@train \
data.val_files=leonardPKU/GEOQA_8K_R1V@test \
data.format_prompt=./examples/format_prompt/r1v.jinja \
worker.actor.model.model_path=${MODEL_PATH} \
worker.rollout.tensor_parallel_size=1 \
worker.reward.reward_function=./examples/reward_function/r1v.py:compute_score \
trainer.experiment_name=qwen2_5_vl_3b_geoqa8k \
trainer.n_gpus_per_node=8这条命令做了什么?
config=examples/config.yaml:加载默认配置文件(包含所有字段的默认值)data.train_files=...:覆盖训练数据路径,直接从 HuggingFace Hub 加载 GeoQA-8Kdata.format_prompt=...:指定 R1-V 风格的 prompt 模板worker.actor.model.model_path=...:指定基座模型worker.rollout.tensor_parallel_size=1:vLLM 推理不分片(3B 模型单卡放得下)worker.reward.reward_function=...:指定 reward 函数文件和入口函数名(用冒号分隔)trainer.n_gpus_per_node=8:使用 8 张 GPU
CLI 的点号语法会逐层覆盖 YAML 中的对应字段。比如 worker.actor.model.model_path 对应 YAML 中 worker.actor.model.path。这种设计让你不用创建新的 YAML 文件就能快速切换实验配置。
完整配置详解
如果你需要更精细的控制(比如开 LoRA、调学习率、改 GRPO 参数),可以通过 CLI 覆盖或创建自己的 YAML。以下是 GeoQA 训练的完整配置拆解:
数据配置(data):
data:
train_files: leonardPKU/GEOQA_8K_R1V@train # HuggingFace 数据集@split
val_files: leonardPKU/GEOQA_8K_R1V@test
prompt_key: problem # 数据集中题目所在列名
answer_key: answer # 数据集中答案所在列名
image_key: images # 数据集中图片所在列名
max_prompt_length: 2048 # prompt 最大 token 数(含图片 token)
max_response_length: 2048 # 模型生成最大 token 数
rollout_batch_size: 512 # 每步 rollout 的总 batch size
format_prompt: ./examples/format_prompt/r1v.jinja # prompt 模板
min_pixels: 262144 # 图片最小像素(512×512)
max_pixels: 4194304 # 图片最大像素(2048×2048)
filter_overlong_prompts: true # 过滤掉超长的 promptrollout_batch_size: 512 意味着每一步 GRPO 更新会对 512 个 prompt 各生成 rollout.n 个回答。GeoQA-8K 训练集约 8000 条,一个 epoch 约 16 步。
算法配置(algorithm):
algorithm:
adv_estimator: grpo # 使用 GRPO(组内相对优势估计)
disable_kl: false # 启用 KL 惩罚
use_kl_loss: true # KL 作为损失项(vs 奖励惩罚)
kl_penalty: low_var_kl # 低方差 KL 估计器
kl_coef: 1.0e-2 # KL 惩罚系数low_var_kl 是一种方差更低的 KL 估计方式,比标准 KL 更稳定。kl_coef=0.01 是 EasyR1 的默认值,比 PPO 的典型值(0.05)更小,因为 GRPO 的组内标准化本身就有正则化效果。
Worker 配置(worker):
worker:
actor:
global_batch_size: 128 # PPO 更新的 mini-batch 大小
micro_batch_size_per_device_for_update: 1 # 每张卡的 micro batch
max_grad_norm: 1.0 # 梯度裁剪
padding_free: true # 无 padding 训练,节省计算
clip_ratio_low: 0.2 # PPO 裁剪下界
clip_ratio_high: 0.3 # PPO 裁剪上界(非对称裁剪)
model:
model_path: Qwen/Qwen2.5-VL-3B-Instruct
enable_gradient_checkpointing: true # 梯度检查点,省显存
freeze_vision_tower: false # 是否冻结视觉编码器
lora:
rank: 0 # 0 = 全参训练;>0 启用 LoRA
alpha: 64
target_modules: all-linear # 对所有线性层做 LoRA
exclude_modules: .*visual.* # 但排除视觉编码器
optim:
lr: 1.0e-6 # 学习率(VLM RL 通常 1e-6 ~ 5e-6)
strategy: adamw # 优化器
rollout:
n: 5 # 每个 prompt 生成 5 个回答(GRPO 组大小)
temperature: 1.0 # 生成温度
top_p: 1.0 # top-p 采样
tensor_parallel_size: 1 # vLLM 张量并行度
gpu_memory_utilization: 0.6 # vLLM 显存占用比例
reward:
reward_function: ./examples/reward_function/r1v.py:compute_score
# 冒号前是文件路径,冒号后是函数名几个关键配置的选择依据:
rollout.n=5:每个 prompt 生成 5 个回答做组内比较。这是 GRPO 的核心——5 个回答的相对 advantage 比绝对 reward 更稳定。可以增加到 8 或 16 来获得更稳定的 advantage 估计,但显存和推理时间也会线性增长clip_ratio_low/high = 0.2/0.3:非对称裁剪——策略变差的容忍度(0.2)低于变好的容忍度(0.3),防止训练崩塌freeze_vision_tower: false:视觉编码器也参与更新。对于几何推理这种需要精确视觉理解的任务,冻结视觉编码器可能限制模型学到新的视觉模式lora.rank=0:默认全参训练。如果显存不够,改为rank=16或rank=32开启 LoRA,配合target_modules: all-linear和exclude_modules: .*visual.*,只对语言模型部分做 LoRA
训练控制(trainer):
trainer:
total_epochs: 15 # 训练轮数
val_freq: 5 # 每 5 步验证一次
val_before_train: true # 训练前先跑一轮验证(获取 baseline)
save_freq: 5 # 每 5 步保存 checkpoint
save_limit: 3 # 最多保留 3 个 checkpoint
find_last_checkpoint: true # 自动从最新 checkpoint 恢复
logger: ['console', 'wandb'] # 日志后端
project_name: easy_r1 # WandB 项目名
experiment_name: qwen2_5_vl_3b_geoqa8k # 实验名
nnodes: 1 # 节点数
n_gpus_per_node: 8 # 每节点 GPU 数LoRA 配置(省显存)
如果只有 1~2 张 24GB 的 GPU,可以开启 LoRA 来训练更大的模型:
python3 -m verl.tainer.main \
config=examples/config.yaml \
data.train_files=leonardPKU/GEOQA_8K_R1V@train \
data.val_files=leonardPKU/GEOQA_8K_R1V@test \
data.format_prompt=./examples/format_prompt/r1v.jinja \
worker.actor.model.model_path=Qwen/Qwen2.5-VL-7B-Instruct \
worker.actor.model.lora.rank=16 \
worker.actor.model.lora.alpha=64 \
worker.actor.model.lora.target_modules=all-linear \
worker.actor.model.lora.exclude_modules=".*visual.*" \
worker.actor.model.freeze_vision_tower=true \
worker.rollout.tensor_parallel_size=1 \
worker.reward.reward_function=./examples/reward_function/r1v.py:compute_score \
trainer.n_gpus_per_node=2 \
trainer.experiment_name=qwen2_5_vl_7b_geoqa8k_lora关键变化:
lora.rank=16:启用 LoRA,将可训练参数降到约 0.1%freeze_vision_tower=true:冻结视觉编码器(LoRA 模式下推荐冻结,避免视觉编码器退化)exclude_modules=".*visual.*":LoRA 只应用于语言模型部分,不动视觉编码器
启动训练
单机多卡
最简单的启动方式——直接运行 baseline 脚本:
bash examples/baselines/qwen2_5_vl_3b_geoqa8k.sh或者用 CLI 覆盖的方式(适合快速调参):
python3 -m verl.tainer.main \
config=examples/config.yaml \
data.train_files=leonardPKU/GEOQA_8K_R1V@train \
data.val_files=leonardPKU/GEOQA_8K_R1V@test \
data.format_prompt=./examples/format_prompt/r1v.jinja \
worker.actor.model.model_path=Qwen/Qwen2.5-VL-3B-Instruct \
worker.rollout.tensor_parallel_size=1 \
worker.reward.reward_function=./examples/reward_function/r1v.py:compute_score \
trainer.experiment_name=my_geoqa_exp \
trainer.n_gpus_per_node=8Ray 会在 main.py 内自动初始化——不需要手动启动 Ray 集群。EasyR1 的 Runner 会在 Ray remote actors 上调度 actor worker(训练)和 rollout worker(推理),通过 HybridEngine 在同一组 GPU 上共享模型权重,避免显存翻倍。
多机多卡
如果需要跨多台机器训练:
# 节点 1(head 节点)
ray start --head --port=6379 --dashboard-host=0.0.0.0
# 节点 2+(worker 节点)
ray start --address=<head_node_ip>:6379
# 验证集群状态
ray status
# 在 head 节点上运行训练
python3 -m verl.tainer.main \
config=examples/config.yaml \
data.train_files=leonardPKU/GEOQA_8K_R1V@train \
data.val_files=leonardPKU/GEOQA_8K_R1V@test \
data.format_prompt=./examples/format_prompt/r1v.jinja \
worker.actor.model.model_path=Qwen/Qwen2.5-VL-7B-Instruct \
worker.rollout.tensor_parallel_size=4 \
worker.reward.reward_function=./examples/reward_function/r1v.py:compute_score \
trainer.nnodes=2 \
trainer.n_gpus_per_node=8 \
trainer.experiment_name=qwen2_5_vl_7b_geoqa8k_multinode关键分布式参数:
trainer.nnodes=2:告诉框架有 2 个节点worker.rollout.tensor_parallel_size=4:vLLM 推理用 4 卡张量并行worker.actor.ulysses_size=1:Ulysses 序列并行度(长序列时可增大)
训练输出
训练开始后,终端会输出关键指标:
[Step 1] train | reward/overall=0.28 | reward/format=0.45 | reward/accuracy=0.11 | kl=0.000 | loss=2.34
[Step 5] val | reward/overall=0.35 | reward/format=0.52 | reward/accuracy=0.18
[Step 6] train | reward/overall=0.41 | reward/format=0.61 | reward/accuracy=0.21 | kl=0.003 | loss=1.89
[Step 10] val | reward/overall=0.53 | reward/format=0.68 | reward/accuracy=0.38
...每个 step 输出三组指标:
reward/overall:GRPO 使用的总奖励,0.5 * accuracy + 0.5 * formatreward/format:格式奖励——模型是否按<thinkutan>/<answer>格式回答reward/accuracy:正确性奖励——答案是否和 ground truth 匹配
如果同时开启了 WandB(trainer.logger 包含 "wandb"),这些指标会自动上传,可以在 WandB dashboard 上看曲线。
训练指标分析

Reward 曲线解读
GeoQA-8K 上典型的训练曲线会经历三个阶段:
阶段 1:学格式(step 1~30)。format 快速上升到 0.8+,accuracy 几乎不动。模型先学会"怎么回答"——按照 <thinkutan>...<answer>... 格式输出,但答案内容还是错的。这是因为格式奖励比正确性奖励更容易获得——只要输出结构对了就有分。
阶段 2:学内容(step 30~100)。accuracy 开始上升,format 维持在高位。模型开始用推理过程推导正确答案。这个阶段 overall 的增长主要来自 accuracy 的贡献。
阶段 3:缓慢提升(step 100+)。accuracy 增速放缓,说明模型遇到瓶颈——剩余的错误可能是模型视觉编码能力不足(图形太复杂、角度太小看不清),这类错误通过 RL 很难修复。
典型回答变化
训练前(reward/overall ≈ 0.0):
12没有推理过程,没有格式标签,答案也可能是错的。
阶段 1(reward/overall ≈ 0.5,format ≈ 1.0,accuracy ≈ 0.0):
<thinkutan>根据图形分析</thinkutan><answer>8</answer>格式对了(<thinkutan>/<answer> 结构完整),但推理内容敷衍,答案是猜的。
阶段 2(reward/overall ≈ 0.7,format ≈ 1.0,accuracy ≈ 0.4):
<thinkutan>观察图形,平行四边形 ABCD 的对角线将图形分成四个三角形。
因为对角线互相平分,所以四个三角形面积相等。
阴影部分包含两个三角形,总面积为 24 cm²,
所以阴影部分面积为 12 cm²。</thinkutan><answer>12</answer>有完整的推理过程,答案正确。
KL 散度监控
KL 值持续增长但增速放缓,说明模型在偏离初始策略但没有失控。如果 KL 突然飙升(比如从 0.01 跳到 0.1),说明学习率可能过大,需要降低 worker.actor.optim.lr 或增大 algorithm.kl_coef。
EasyR1 默认使用 low_var_kl 估计器,比标准 KL 估计的方差更低,曲线更平滑。
自定义 Reward 函数
如果你想根据自己的需求调整 reward,只需要写一个 Python 文件。框架约定非常简单:
# my_reward.py
from typing import Any
REWARD_NAME = "my_geoqa" # 日志中显示的名字
REWARD_TYPE = "batch" # "batch" 批量处理 或 "sequential" 逐条处理
def compute_score(
reward_inputs: list[dict[str, Any]], **kwargs
) -> list[dict[str, float]]:
"""
reward_inputs 中每条包含:
- response: str 模型生成的回答
- response_length: int token 数量
- ground_truth: str 数据集中的 answer 字段
返回的字典必须包含 "overall" 键(GRPO 使用的总奖励),
其他键是辅助指标,会记录到日志中。
"""
scores = []
for reward_input in reward_inputs:
response = reward_input["response"]
gt = reward_input["ground_truth"]
# 你的评分逻辑
accuracy = 1.0 if check_answer(response, gt) else 0.0
format_score = check_format(response)
scores.append({
"overall": 0.7 * accuracy + 0.3 * format_score,
"accuracy": accuracy,
"format": format_score,
})
return scores然后在配置中指向这个文件:
worker.reward.reward_function=./my_reward.py:compute_scoreREWARD_TYPE 的两种模式:
"batch":函数接收list[dict],返回list[dict]。适合需要批量处理的场景(如调用 GPU 上的 reward model)"sequential":函数接收单个dict,返回单个dict。框架会逐条调用。适合简单的规则奖励(如 r1v.py)
**kwargs 会接收 YAML 中 worker.reward.reward_function_kwargs 配置的额外参数。比如 r1v.py 的 format_weight 就是通过这种方式传入的。
Checkpoint 和模型导出
训练过程中,EasyR1 会定期保存 checkpoint 到 checkpoints/<project_name>/<experiment_name>/global_step_N/。checkpoint 包含 actor 模型权重、优化器状态和训练器状态。
把 checkpoint 转换为标准 HuggingFace 格式:
python scripts/model_merger.py \
--model_path Qwen/Qwen2.5-VL-3B-Instruct \
--adapter_checkpoint checkpoints/easy_r1/qwen2_5_vl_3b_geoqa8k/global_step_15/actor \
--output_path ./merged_geoqa_model转换后就可以用标准 transformers 加载:
from transformers import Qwen2_5_VLForConditionalGeneration
model = Qwen2_5_VLForConditionalGeneration.from_pretrained(
"./merged_geoqa_model"
)如果开启了 LoRA,model_merger.py 会自动把 LoRA 权重合并回基座模型。合并后的模型和全参训练的模型使用方式完全一样,不依赖任何 LoRA 推理库。
和 11.1 节手写实验的对比
| 方面 | 11.1 手写 GRPO | 本节 EasyR1 |
|---|---|---|
| 数据集 | 合成几何图形(自己生成) | GeoQA-8K 真实数据集 |
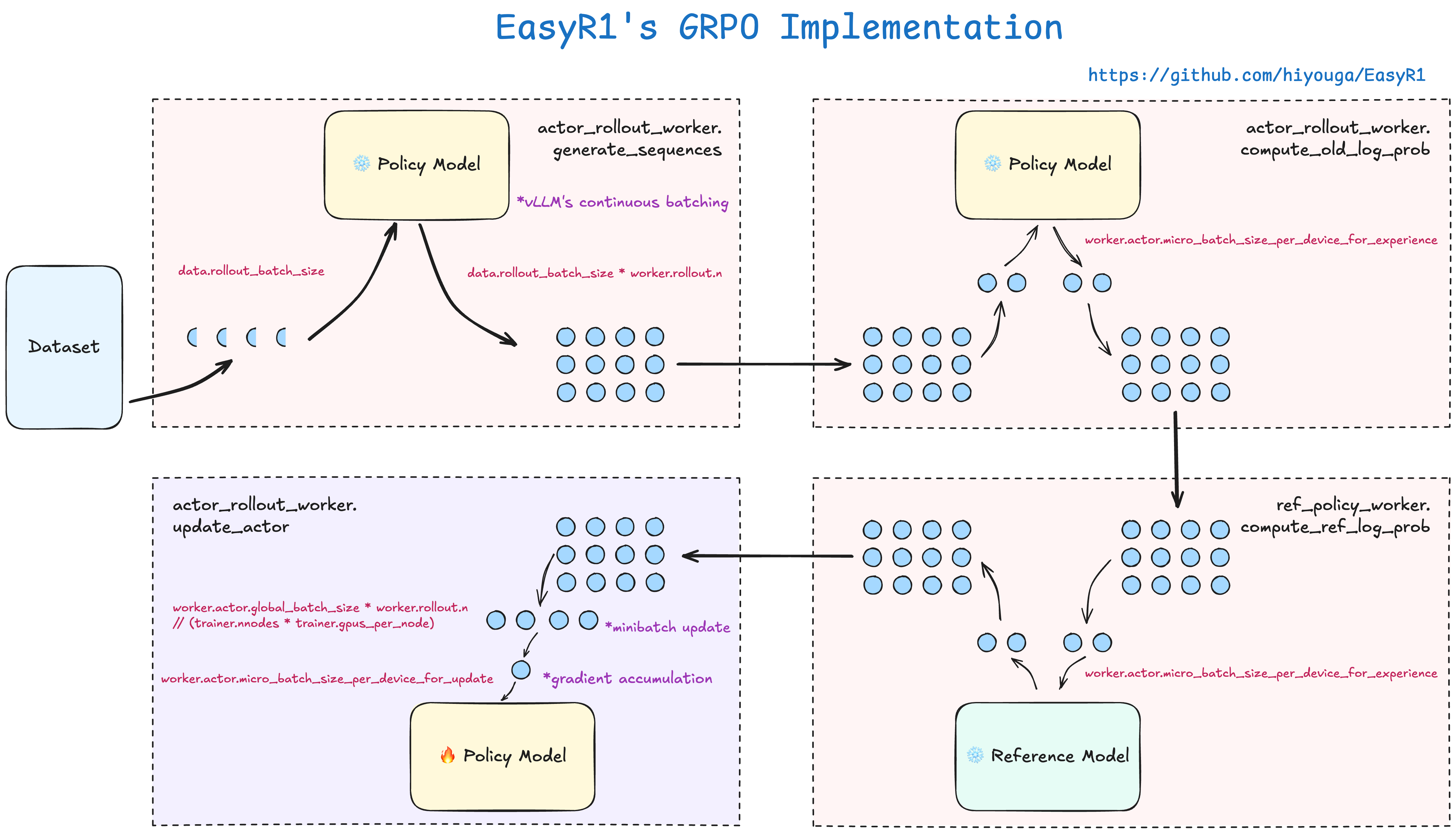
| 推理引擎 | model.generate() 逐条 | vLLM continuous batching |
| 训练引擎 | 单卡 AdamW | veRL + FSDP |
| 显存优化 | 无 | LoRA + padding-free + gradient checkpointing |
| 分布式 | 单进程 | Ray 集群,支持多机多卡 |
| 日志 | WandB / TensorBoard / SwanLab | |
| 训练规模 | ~500 条,几分钟 | ~8K 条,几小时 |
EasyR1 帮你省掉的工作量:vLLM rollout 的集成、FSDP 分布式训练的调度、LoRA 的实现、梯度累积和显存优化、checkpoint 管理和恢复。你只需要关注两个核心决策:(1) 数据集怎么选,(2) reward 函数怎么设计。这两个决策也恰恰是 VLM RL 训练中最影响效果的因素。
扩展实验
- 换基座模型:对比 Qwen2.5-VL-3B 和 7B 的训练曲线。3B 模型的视觉编码器更小,几何推理的 accuracy 上限可能更低
- 换算法:把
algorithm.adv_estimator从grpo改为dapo或reinforce_plus_plus,对比训练曲线。EasyR1 支持 7 种算法,只需要改一行配置 - 开 LoRA 做全参对照:同一模型,
lora.rank=0(全参)vslora.rank=16(LoRA),对比 accuracy 和显存占用 - 调
format_weight:从默认的 0.5 改为 0.1 或 0.9,观察格式奖励权重对推理质量的影响 - 增加 rollout.n:从 5 增加到 8 或 16,观察 GRPO 组内比较的 advantage 估计是否更稳定
本章总结
本章从"手写几十行 GRPO 训练 VLM"推进到"用工业框架在真实数据集上训练"。沿途我们讨论了视觉奖励的信用分配难题、视觉幻觉的应对策略、以及从 VisPlay 到多模态 Agent 的前沿框架。
贯穿全章的核心观察:VLM RL 的算法骨架仍然是 GRPO/PPO,但多模态输入把 reward 设计从"判断答案对不对"变成了"判断模型有没有真的看图、看懂图、基于图像证据推理"。 这个转变让 reward 函数的设计变成了 VLM RL 中最关键的工程决策——比模型选择、训练参数、分布式策略都重要。
回到本节的 EasyR1 实验:r1v.py 的 reward 只有两个组件(format + accuracy),但这恰恰说明了好的 reward 设计不需要复杂——它需要的是对任务本质的准确理解。几何推理的核心是"看图 → 推理 → 答案"三步,reward 就对应这三个环节的质量。